控制系统电子#
本页包含控制系统中已知电子设备的故障,以及有关它们的任何注释
Expansion Hub内部#
警告
除非你真的知道你在做什么,否则不要拆开控制或扩展集线器。它们可能会在这个过程中损坏,尤其是如果你不知道如何正确地重新组装它。这将使你的保修无效!
Lynx电路板#
“Lynx”是扩展集线器和控制集线器中与硬件交互的电路板的代号。FTC® SDK 中提到的“Lynx”就是指这块板。它似乎是由 REV 和 DEKA 共同开发的,可能用于 FIRST® Global(根据PCB上的FIRST Global丝网印刷判断)。
警告
除非你真的知道你在做什么,否则不要拆开控制或扩展集线器。它们可能会在这个过程中损坏,尤其是如果你不知道如何正确地重新组装它。

一块从机箱中取出的 Lynx 电路板#
处理器#
扩展集线器(Expansion Hub)的主处理器是Texas Instruments ARM Cortex M4,运行频率为 80 MHZ。
端口#
扩展中心有以下端口:
两个通用异步收发设备调试端口
顶部端口从集线器中的各个子系统输出连续的高速CSV数据流。
底部端口以用户指定的详细程度以115200的波特率输出数据。
四个I2C端口
这些端口符合100/400 kHz标准,并连接到单独的总线,因此无需担心地址冲突
此端口上有集成上拉电阻
八个DIO端口
仅3.3V,电流有限,可短暂提供超过额定电流规格的电流。内部拉起。
四个模拟端口
5V兼容,你可以使用电平转换器向传感器供电5v,但要注意模拟线绕过电平转换器。然而,VIN和GND线必须通过电平转换器才能工作。
六个舵机端口
舵机端口上的5V电源默认关闭,仅在使用舵机时启用。所有六个5V引脚一起打开和关闭,除非使用另一个舵机,否则禁用一个端口上的PWM将关闭所有端口。
两个5V电源端口
5V电源与舵机共享
四个电机端口
电流受限,芯片上有过温保护。在PWM关闭周期期间,输出不会制动h桥。这意味着由于电机中的动量,在减速时可能会出现线性问题。
电机驱动器是ST微电子VNH5050电机驱动器IC,能够很好地处理FTC电机可以消耗的最大电流。它集成了电流传感,自现代机器人时代以来一直在使用。它内置了热和电流安全限制。这种电机控制器已经使用多年,甚至可以追溯到早期基于HiTechnic的控制系统。
四个编码器端口
重要提示:只有两个编码器端口(端口0和3)似乎是通过硬件连接的,并且在高速下是可靠的 有两种方法可以通过硬件和软件将编码器内部连接到德克萨斯仪器的微处理器。硬件端口使用集成的正交解码器芯片,在高速下非常准确,而在软件中解码的编码器在高速下并不可靠。因此,每转计数超过4000次的高计数(CPR)编码器不应用于软件连接的端口1和2。
两个XT30连接器
在电缆周围移动时应小心,因为已知这些连接器会出现故障并从电路板上脱落。
此外,XT30s会随着时间的推移而磨损和松动。如果电缆松动,建议使用热胶。
USB B连接器
能够全速USB 2.0和5V输出为手机充电。5v输出可能不可靠,取决于集线器。
内部连接器
这个连接器是用来连接android子板的。据推测,它具有通用异步收发设备功能以及电源和接地功能。所有扩展集线器都有这个连接器,无论它们是否是控制集线器。据推测,这是因为控制集线器和REV集线器是同时开发的。
控制中心#
控制中心(Control Hub)是一个扩展集线器,它连接了一个嵌入式Android单板计算机子板。这使得它不需要单独的机器人控制器电话,因为子板充当机器人控制器。在内部,LynxCommand通过内部通用异步收发设备连接从子板发送到Lynx板。
控制集线器子板包含一个RK3328四核ARMCortex-A53,运行一个定制版本的安卓/Linux。这个软件是开源的,但是除了一些管理wifi接入点的软件之外,没有什么重要的东西。它在芯片上没有热扩散,比如散热器,当使用像tenorflow这样的重型应用程序时,会导致热节流。
警告
除非你真的知道你在做什么,否则不要拆开控制或扩展集线器。它们可能会在这个过程中损坏,尤其是如果你不知道如何正确地重新组装它。
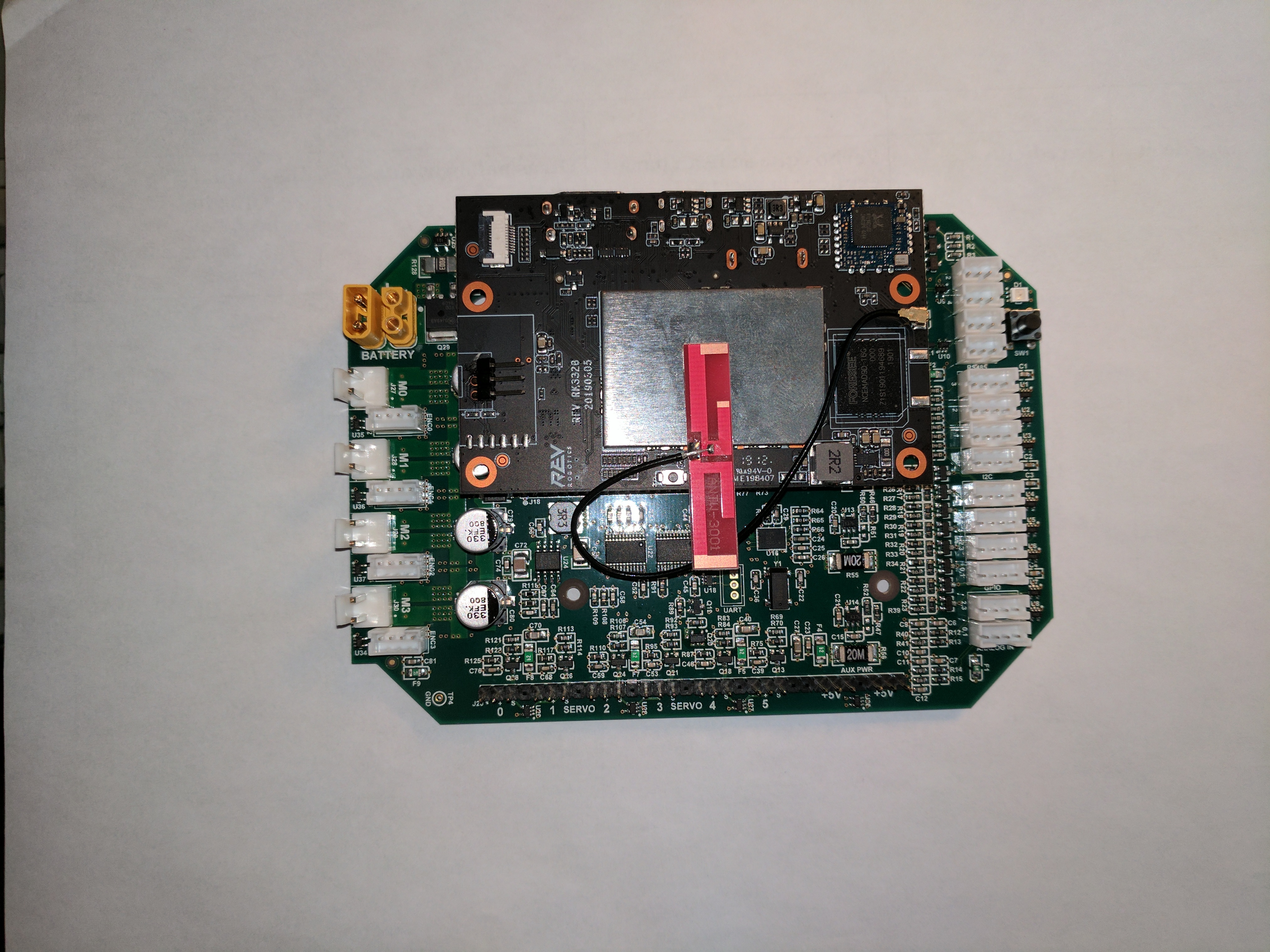
Control Hub的单板计算机和 Lynx 板#

从Control Hub拆下的安卓板#