传动结构¶
传动结构是指通过设置线缆、皮带或链条来伸展和缩回线缆性延伸器的一种结构设计方式。对于任何使用线缆性延伸器的团队来说,这是一项重要且耗时的要求,因此一定要花足够的时间来完成。

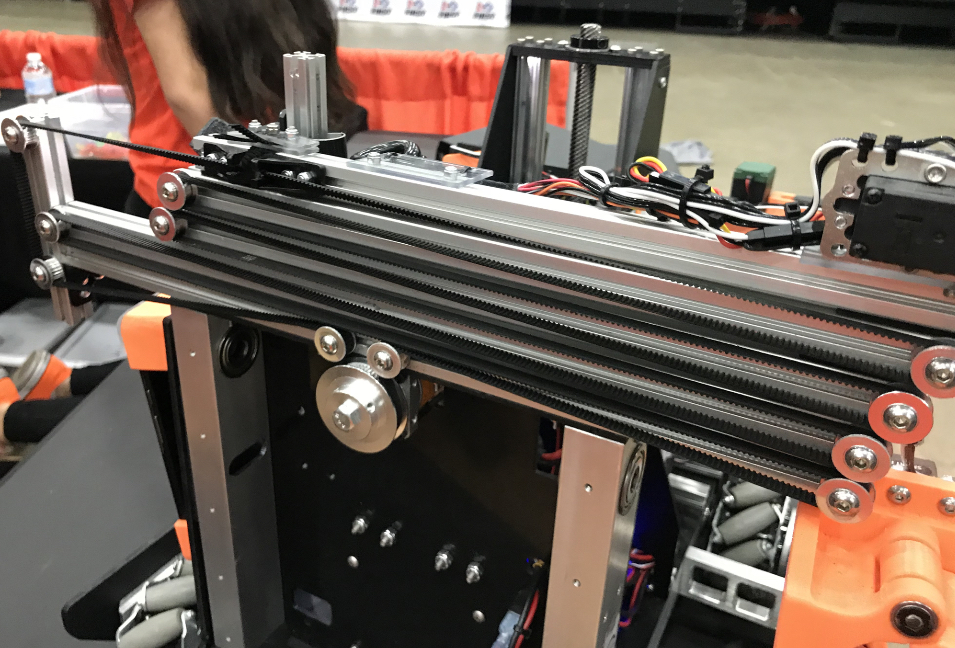
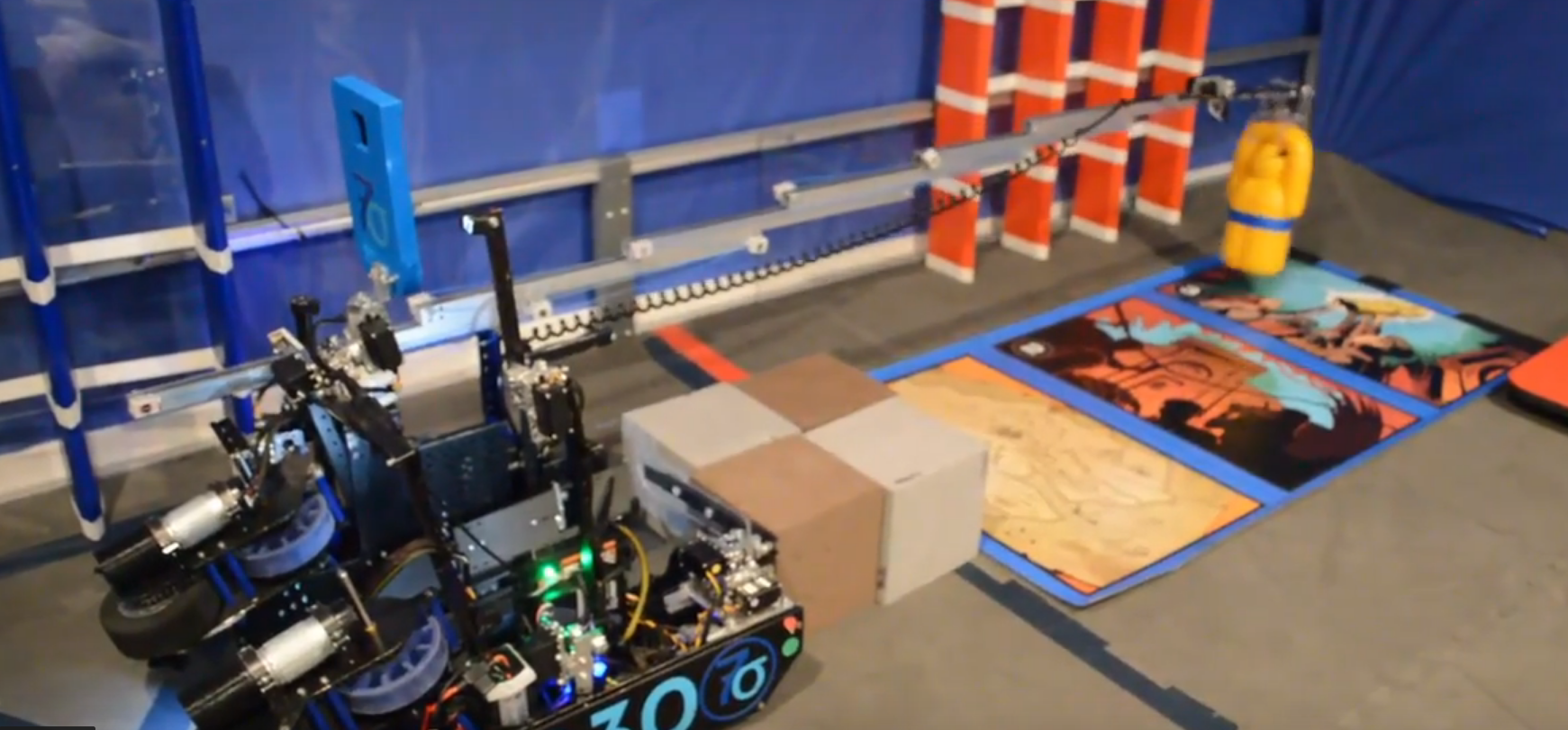
来自 7236 Recharged Green 参赛队伍的传动结构安装示例。该装置的第一级采用连续串接装置,第二级采用级联皮带驱动装置。¶
基本传动结构技巧¶
在加长杆缩回时绑好加长杆绳,在加长杆处于最大加长状态时绑好缩回绳
用螺栓夹住绳子,而不是把它绑在你的其他架构上,这样可以更容易地快速改变绳子的张力
如果在塑料部件上绑上凯夫拉纤维(由其同名公司研制的一种芳纶纤维——译者注)等磨蚀性材料线缆,可以将线缆绑在垫圈上,以分散滑轮孔中的载荷,而不是直接绑在滑轮孔中。
一般来说,从有滑轮的一侧开始绑,到滑道的末端,然后再反过来,会更容易些。
连续传动结构¶
一般建议
连续传动结构需要将一根长长的 延长绳,从一个马达驱动的线轴上拉出,拉到基础平台的顶部,然后拉到第一级平台的底部,再拉到第一级平台的顶部,然后拉到第二级平台的底部,等等。然后,从与延伸线轴处于同一轴线缆上的第二个线轴上引出的 收缩绳 被固定在顶级上。当电机向一个方向旋转时,延长线缆卷轴将延长线缆卷入,使其变短。这样,一级顶端与下一级底端之间的距离就会减小,从而使系统延伸。
备注
最后一级总是先于其他各级伸出和缩回(取决于应用情况不同,这可能带来优势,也可能带来劣势)。
一旦上一级达到极限,紧接着的下一级就会向外伸展,依此类推;这种模式不断重复,直到每一级都完全伸展为止。当电机 反向 旋转时,缩回绳被卷入,将顶级拉近其起始位置,直到系统回到起始位置。对于缩回绳,通常需要在伸展器后部附近增加一个额外的滑轮。这是因为缩回装置只能缩回到最远点,通常就是线轴。不过,线轴可能不会安装在机器人的最里面,因此需要额外的滑轮。需要注意的是,要想实现这一功能,延长线缆应绕在线轴上,方向与回缩线缆相反。因此,如果延长线缆按顺时针方向缠绕,则缩回线缆必须按逆时针方向缠绕。
以下是在装配连续系统时的一些额外注意事项。
一般来说,连续线轴可由齿轮比相对较低的系统提供动力。
拉伸绳和回缩绳 不需要分开,但如果分开,张紧这个架构会容易得多。
延伸线轴和缩回线轴的直径应相同。
与任何时候使用绳缆和滑轮一样,你需要确保你拉动的绳缆是直的。任何偏差都可能导致绳子从滑轮上脱落。
线轴的宽度和直径应足够大,这样一旦完全缠绕,线缆就不会重叠。这是因为当线缆开始重叠时,会改变线轴的直径,从而导致线缆的张力发生变化。
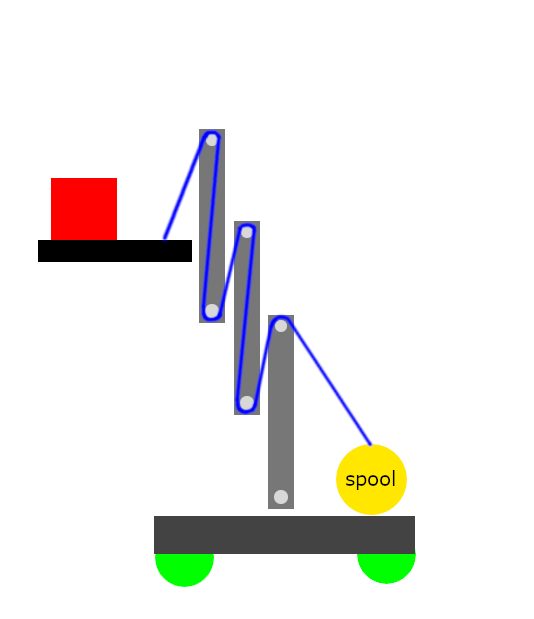
连续传动结构图¶
层叠式传动¶
一般建议
层叠式传动结构比连续传动结构复杂一些。与连续式传动结构类似,从线轴开始的延伸线缆被固定在底座的顶部,然后向下延伸至第一级的底部。不过,延伸绳并不是固定在平台顶部,而是锚定在第一级的底部。锚定在底座顶部的第二根延伸线缆被固定在第一级的顶部,并锚定在第二级的底部。这种模式一直持续到所有阶段都安装完毕。
备注
扩展所需的联结数量等于系统中的级数。
当电机朝一个方向旋转时,延伸线轴卷入第一根线缆,减小第一级底座和底部之间的距离。这将推动第二根绳向前,减小第一级顶部和第二级底部之间的距离,依此类推。请注意,与连续索具不同的是, 每个级都同时移动 。第二级相对于底座的移动速度是第一级的 2 倍,第三级是第一级的 3 倍,以此类推。
建造成层叠式的传动系统可以通过三种方式缩回:连续缩回、弹性缩回或逆向层叠式缩回。
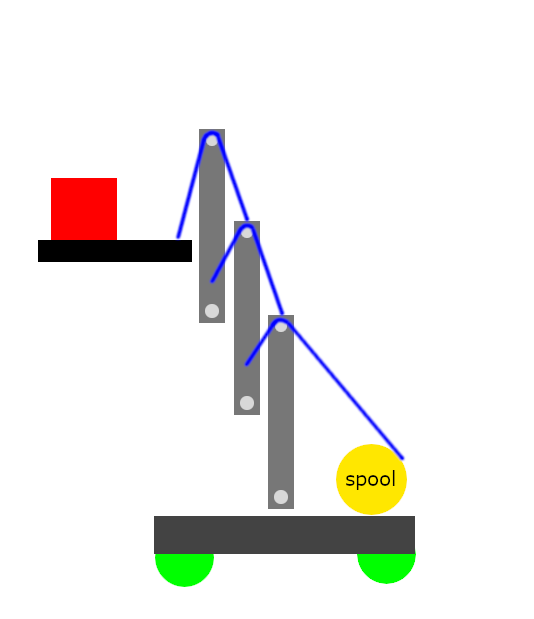
层叠式传动结构的图片¶
回缩选项¶
连续回缩¶
顾名思义,连续缩回利用倒置的连续索具来缩回滑轨。主要有两种方法:自由浮动回缩 ,即绳子从最后一级直接回到线轴; 滑块附带回缩 ,即绳子以反连续模式运行。一般来说, 滑块附带回缩 应与机器人框架外的延伸部分一起使用,以防止缠绕,而 自由浮动回缩 只能与纯垂直滑块一起使用。
备注
如果连续缩回与级联延伸同时使用,则两个线轴的直径不能相同。如果变量 \(N\) 是系统中的级数,则级联延伸线轴的直径必须比连续缩回线轴 小 \(N\) 倍 。
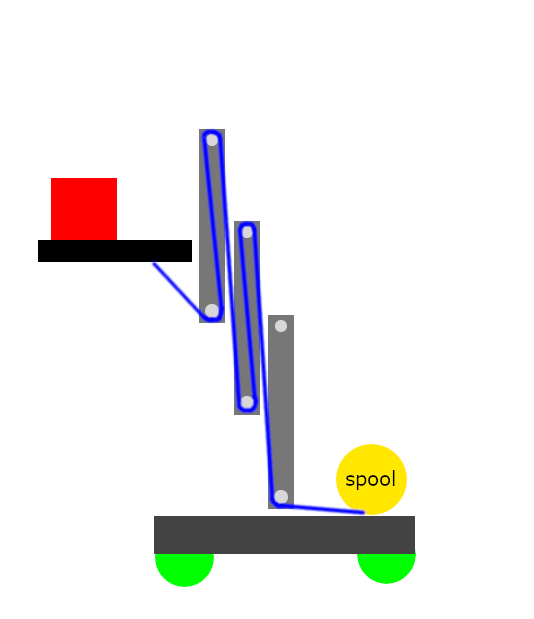
连续回缩¶
警告
如果使用自由浮动缩放, 确保缩放绳始终与滑台平行 。如果线缆错位,就会拉扯滑块,导致平台产生过大的弯曲力。
优点
缩回装置的结构最简单
缺点
如果自由漂浮,可能会缠结在一起
如果与层叠式缩回装置一起使用,则需要不同尺寸的线轴
弹性回缩¶
一种常见的缩回方法是在最后一级上连接一段弹性材料(通常是手术用管),而不是使用缩回线轴。伸展时,松紧带对最后一级施加的力被电机抵消。不过,在缩回时,马达会将最后一个滑块卷回。虽然这是许多套件幻灯片手册推荐的缩回方法,但并不推荐使用这种方法。
优点
只有一根线缆需要张紧,而不是多根,因此张紧更简单。
松紧带会自动拉紧延长线缆。
缺点
由于弹性体在任何时候都会对滑块施加一个力,这个力与马达在拉伸滑块时施加的力相反。因此,弹性回缩会大大降低伸出速度。
松紧带不会始终施加恒定的力。它所施加的力与滑块的伸出量成正比,因此缩回时可能不像其他索具方法那样平稳可控。
使用弹性回缩时,很容易松开加长卷轴。
层叠式回缩¶
级联式回缩只需简单地安装另一套级联线缆,在啮合时即可缩回系统(见下图)。
备注
如果级联缩回与连续拉伸同时使用,则两个线轴的直径不能相同。如果变量 \(N\) 是系统中的级数,则连续拉伸线轴的直径必须 比级联缩回线轴 大 \(N\) 倍。
优点
非常节省空间
所有阶段同时以相同速度缩回
缺点
需要更多线缆(需要张紧的线缆更少,可能松动的线缆更少)。
如果与层叠式延长线一起使用,则需要不同尺寸的线轴
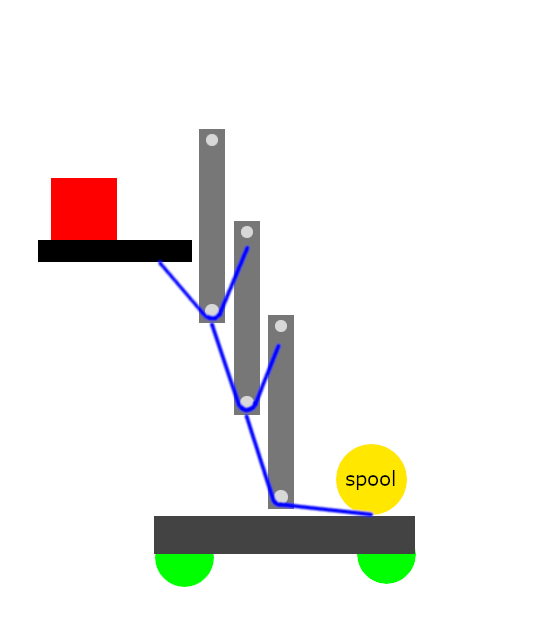
层叠式回缩¶
其他需考虑因素:
如果系统只有一个阶,则级联索具 与连续索具 相同。
与连续式索具不同的是,层叠系统每增加一级,保持相同延伸速度所需的齿轮比就会增加。例如,如果在齿轮比为 3:1 的一级级联移位机上增加两级,则齿轮比必须增加 \(\frac{2+1}{1}\) 的系数才能保持相同的速度,即齿轮比变为 9:1。
层叠索具的一个缺点是必须保持每根线缆的张力。连续式索具虽然也是如此,但需要跟踪的线缆更多,因为必须保持所有线缆的张力。
与任何时候使用绳缆和滑轮一样,你需要确保你拉动的绳缆是直的。任何偏差都可能导致绳子从滑轮上脱落。
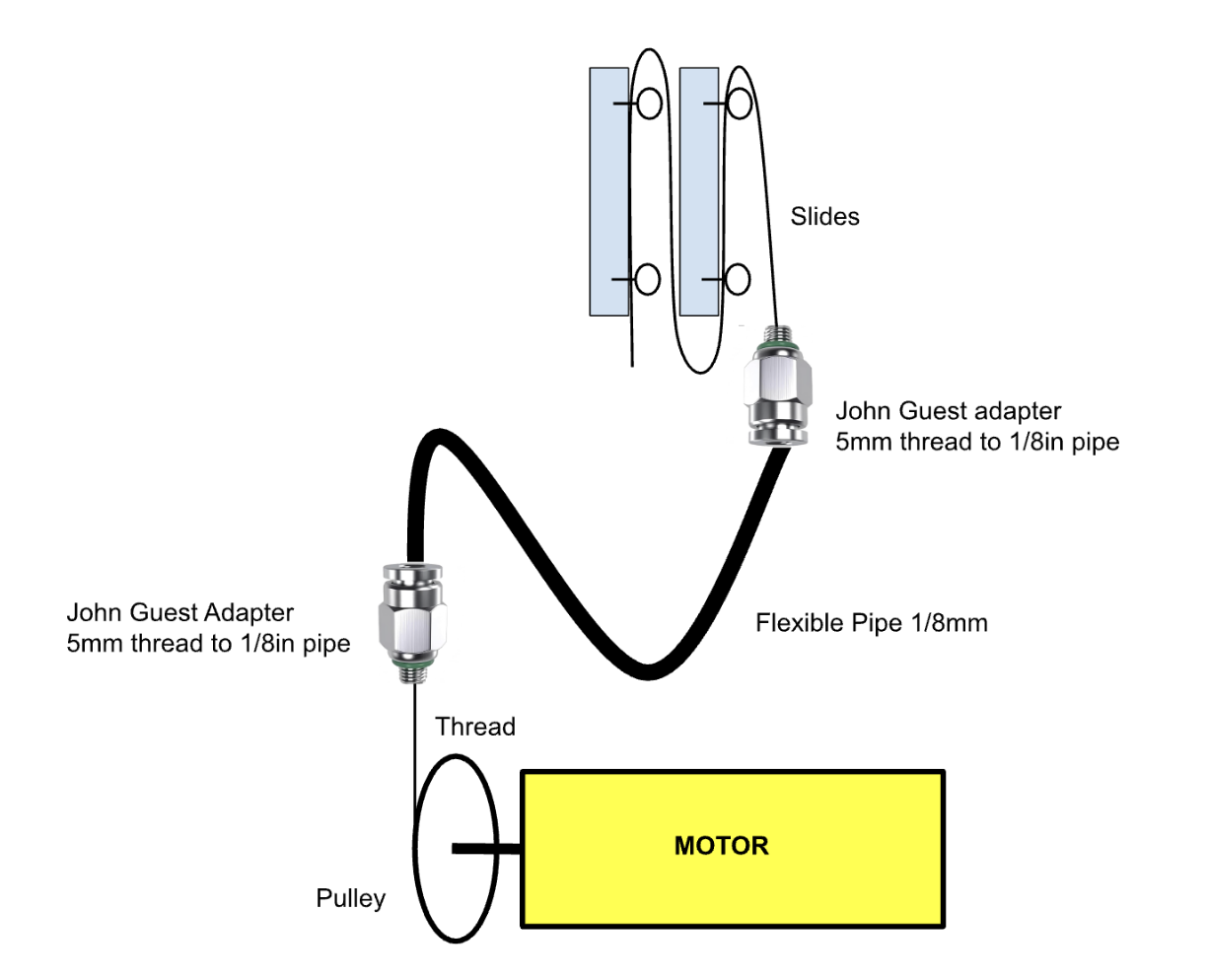
使用 PTFE(特氟龙)套管和 John Guest 转换接头穿线¶
如果您希望将线性滑轨安装在与电机/滑轮不同的位置,可以考虑使用PTFE(特氟龙)管和 John Guest 适配器来布线。

1/8 英寸增加管和一侧带有 M5 螺纹的 John-guest 按压连接适配器非常适合这种用途。这些管子与 3D 打印机中用于铺设长丝的管子完全相同。
管道可以长距离铺设,而不会明显增加摩擦力
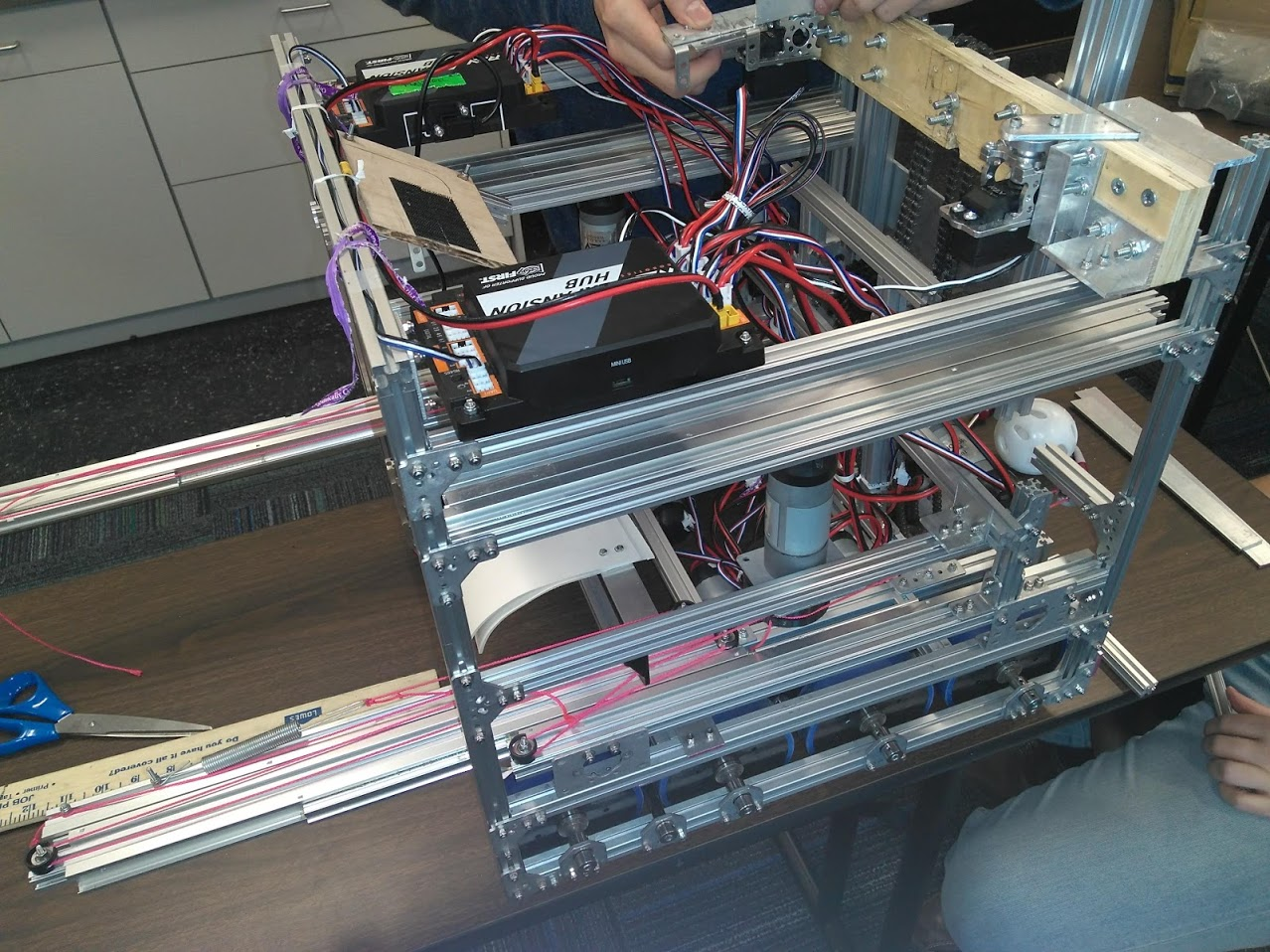
23292 SuperPowered Jalapenos,John Guest 适配器传动示例¶
皮带驱动滑轨¶
除传统的线缆索具外,皮带驱动滑轨也越来越受欢迎。这种方式可以使用连续结构,也可以使用层叠结构。
与线缆相比的优点¶
与线缆不同,滑轨上使用的皮带无需张紧。正如线缆性运动部分所讨论的,为了让线缆驱动的滑轨保持高效,必须保持线缆的张力。随着时间的推移,线缆自然会松弛,因此你要么需要一个能提供额外张力的装置(弹簧),要么需要手动拉紧线缆,这可能会有点繁琐(尤其是在级联索具上)。
However, belts do not have this issue. They tend not to stretch over time, meaning complex external tensioners are rarely needed. Belts are also on an automatic one to one loop, meaning that for every inch you pull in on the extension side, you always feed back out that inch on the retraction side, and vice versa. While this might not seem like a big deal, if a string winds itself up on a spool and overlaps at any point, the diameter of the spool changes, making the two spools out of sync.
与线缆相比的缺点¶
皮带驱动滑轨的主要缺点是占用空间大。简而言之,皮带轮比 REV 出售的厚度为 4 毫米、直径为 12 毫米的皮带轮轴承占用的空间要大得多。使用皮带驱动滑轨时,滑轮的厚度至少是皮带驱动滑轨的两倍,直径也大得多,这意味着每个阶段都必须加厚。

7236 Recharged Green,Rover Ruckus, 连续 钻机¶
11190 Mechadojos,Relic Recovery,连续带式钻机¶
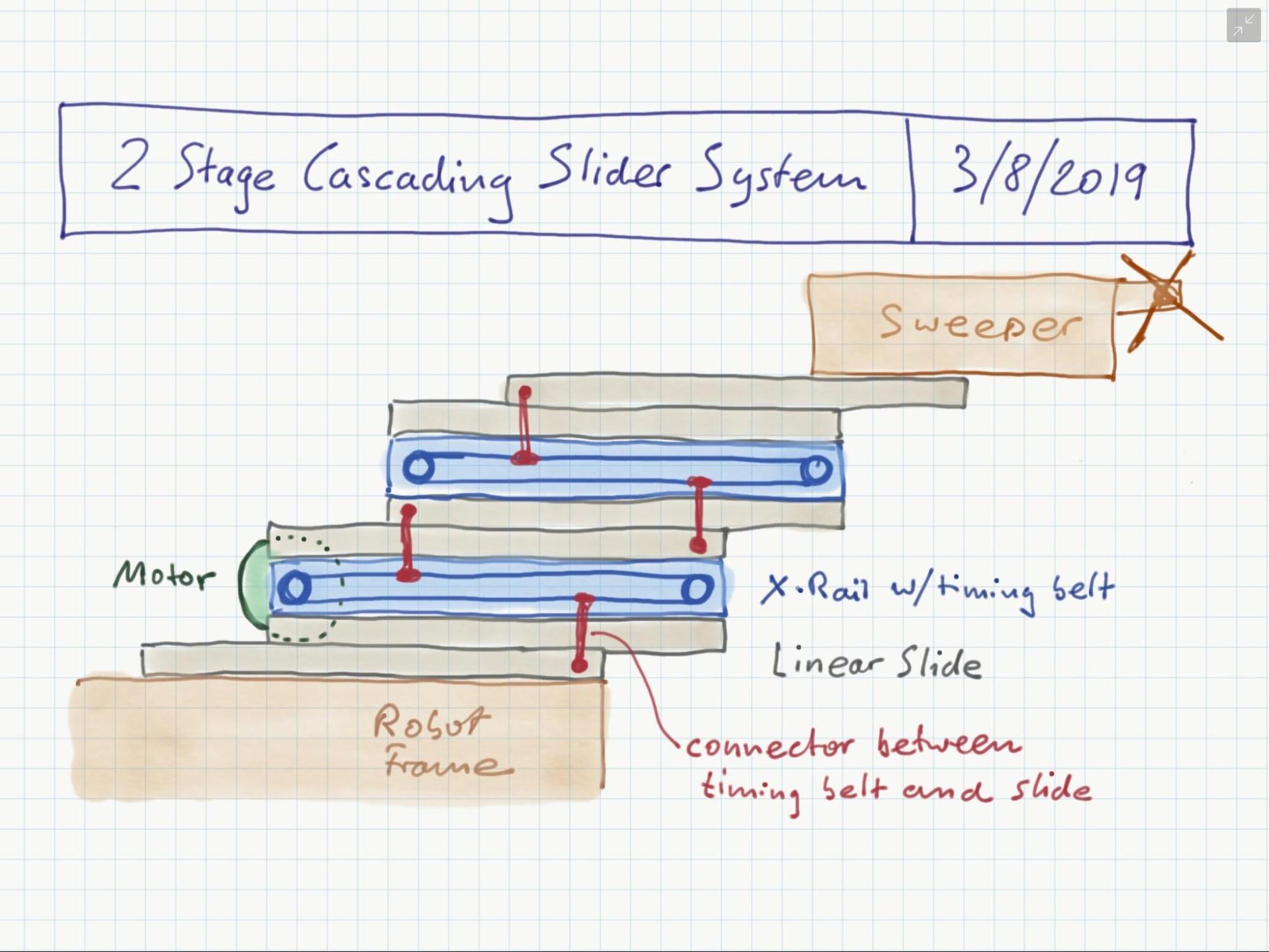
5064 光圈科学漫游车 Ruckus 级联 皮带驱动概念验证图¶

5064 光圈科学漫游车 Ruckus 级联 皮带驱动最终版¶
皮带或链条驱动升降机¶
皮带和链条升降机在 FRC® 中几乎无处不在,似乎一直存在。其基本前提是在升降器的顶部和底部安装链轮或滑轮,将其固定在机器人上部结构上。然后,用硬螺栓将皮带或链条固定在靠近底部链轮或滑轮的升降器上。当链条或皮带被驱动时,升降器将上下移动。升降器可以采用多级设计,但其动力装置将更为复杂。

7236 Recharged Green, Rover Ruckus¶
拉伸器¶
张紧线缆是 FTC 结构组人员最辛苦的工作之一。确保两组滑轨张力均匀是一项艰巨而恼人的工作。不过,在线缆上安装张紧器可以帮助解决张力不均的问题,并确保两边的滑轨一起运行。最常见的张力器是一个弹簧,可以在五金店买到。一般来说,它会被放置在线缆的末端,靠近从机器人中心向外延伸最远的部分。这样,当线轴伸出机械臂时,线缆绳就会伸展开来,保持张力,从而避免线缆绳从线缆性滑轨延伸部分的滑轮上脱落。
另一种张紧器是弹簧滑轮。由于滑轮是弹簧加载的,因此它可以承受绳子的松弛。另外,也可以将滑轮安装在一块铝型材上,然后滑动滑轮使绳子绷紧。
There are two main reasons that tensioners are highly recommended in string based linear slides, the first and oftentimes more important one is that at its core, a run of string is a series of polygons, and as the slide extends the effective size of that polygon changes. Meaning that when fully extended, your slide may require more or less string compared to when halfway extended. Or partially extended. The closer each set of bearings are, the less this impacts string tension.
另一个(但影响较小)需要注意的问题是,线轴的尺寸会随着线缆绳从线轴上添加/移除而发生变化。如果线轴半径增大,延伸的速度也会增大,而与速度相反的扭矩会减小。因此,张力也会发生变化。因此,在所有使用线缆绳的线缆性延伸设计中,都会存在一定的松弛。
注意
强烈建议参赛队为每套线性滑块至少配备一个弹簧拉伸器。

13075 Coram Deo Robotics、Rover Ruckus、线缆张紧器¶
选择合适的线轴尺寸¶
线轴有一个不常被讨论的特殊属性,但在创建线性滑轨系统时却非常有用。正如系统的速度和扭矩可以通过改变齿轮比来改变一样,速度和扭矩也可以通过改变线轴尺寸来改变。电机以恒定的角速度旋转线轴。因此,平移速度(滑动速度)与转轴半径成正比,由于扭矩与速度成反比,因此改变转轴尺寸也会改变扭矩。
认识到这一点很重要,因为要获得所需的速度和扭矩组合,改变线轴尺寸往往比改变齿轮比更方便。例如,你有一个齿轮比为 3.7:1 的线性延伸系统。然后,你认为 5:1 的齿轮比比目前 3.7:1 的齿轮比更能提供理想的速度和扭矩组合。
在许多情况下,与其更换齿轮箱,不如将转轴更换为更小的转轴。如果目前的线轴是 2 英寸,那么新的线轴尺寸应该是 \(\frac{2*3.7}{5}\) 英寸,这样才能达到相同的效果。
你还需要确保线缆或线缆完全缠绕在线轴上时不会重叠。重叠会导致线轴直径发生变化,从而改变线缆的张力。
电缆管理¶
向外延伸时,电线管理变得越来越重要。显然,必须使用比延伸长度稍长的电线。不过,我们不建议在没有保护措施的情况下使用这些电线,因为与有保护措施的电线相比,它们更容易缠绕或卡住滑轨。
一般来说,参赛队应确保电线永远不会伸出机器人的结构部分之外,因为它们可能会被其他机器人或游戏部件卡住。为此,可以使用扎线带或尼龙搭扣带,或使用丙烯酸板将电线固定在内部。
不过,对于线性延长线,还需要其他形式的线缆管理。推荐的两种电缆管理方式是电缆支架和可伸缩卷线。有关详细信息,请参阅 电元件与线缆 部分。
电缆架/拖链¶
电缆架是工业领域的标准电线管理方法,是一种中心中空的塑料链节。电缆放置在链条内,使系统可以无限延伸。链节有一定的硬度,但又有一定的柔韧性,使电缆链在缩回时可以弯曲,在伸出时可以拉直。它们通常具有足够的硬度,在缩回时不会过度下垂。
下面是一些有关各种拖链产品的链接:
优点
难以缠绕/钩住其他物体或机器人
坚固耐用
很好地保护电线
缺点
外形尺寸大,占用空间大
如果需要额外扩展,需要添加连接器
可能会偏重,尤其是拖链较长时

7236 Recharged Green,Rover Ruckus:水平滑道左侧和垂直滑道右侧的电缆支架¶
可伸缩线圈¶
虽然线圈在工业中并不常见,但仍然非常普遍(线圈线几乎是老式电话中无处不在的主要部件)。伸缩式线圈电线比电缆载体更灵活,伸展时可以拉伸。
优点
非常节省空间
灵活,通常可延伸至所需的任何长度(与电缆支架不同,无需添加新链路)
缺点
由于硬度低于拖链,因此更容易缠结
10030 7 Sigma Robotics, Relic Recovery:水平延伸装置上的线圈绳¶
自动伸缩支架¶
虽然这种技术并不常见,但可自动伸缩支架可以帮助管理外部连接件上的接线。这些都是常见的物品; 这里有一个来自亚马逊的购买链接。 。
这实际上只适用于垂直或接近垂直的滑动,因为缆线仍会有一些下垂,如果延伸到机器人框架之外,就很容易缠绕在一起。
要将自动伸缩式证章套安装到电线缆上,可将证章套的硬塑料部分安装到滑梯底座上,然后将证章套的线缆末端安装到电线缆上。电线缆应硬性安装(使用拉链或团队使用的其他工具)到缩回滑轨的顶部,并留有足够的松弛空间。为了达到最佳效果,当滑梯缩回时,证章套应几乎完全缩回(留出一两厘米的松弛空间)。
优点
极其简单,易于实施
灵活,通常可延伸至所需的任何长度(与电缆支架不同,无需添加新链路)
缺点
与线圈类似,自动伸缩式线缆管理绳更容易缠绕在一起,因为它没有拖链那么硬
在没有大量工程设计的情况下,对长滑道(超过2级)效果不佳
248 Fatal Error, Freight Frenzy: Badge retractor cable management on extension mechanism 扩展装置上的徽章伸缩器电缆管理¶