坦克(滑移装载机)传动系统¶
2轮驱动(推杆驱动)¶
建议仅用于你的团队入门用的动力系统,而不用于比赛
这种新手传动系统被认为是低级传动系统之一,尽管它在低级比赛中也能使用。这是许多新手的入门传动系统类型,因为 FIRST® 出版的官方指南中推广了这种传动系统(给它起了个名字叫pushbot)。它通常有 直接驱动 牵引轮 和无动力的 全向轮 。
这种传动系统的转弯性能较差,因为转弯中心位于机器人后部的两个动力轮之间。与其他传动系统相比,由于只使用了两个电机,它的加速性能也较差。
尽管这可能不是最佳的动力传动系统,但只要动力传动系统可靠,还是有可能取得竞争优势的。作为共识,我们建议每支新参赛队制作推杆机器人,主要是为了学习如何使用套件进行制作。pushbot 是一个很好的起点,可以帮助团队熟悉如何使用套件部件、安装车轮和电机等。但是,在竞技环境中,它与其他任何动力传动系统相比都不尽如人意。
注意
虽然推杆机器人是新团队熟悉该套件的第一套传动系统,但建议团队在制作比赛机器人时不要使用该传动系统。
优势¶
最简单、最容易制作的动力传动系统
无需担心为四个车轮提供动力
劣势¶
比其他可选传动系统慢
动力不足(所有其他传动系统方案通常使用 4 个电机)
使用 Tetrix MAX 电机,容易烧毁,动力不足,变速箱也很脆弱。
由于使用 2 个电机转弯,缺乏灵活性和机动性
2 个电机导致加速性能差
通常使用 直接驱动 ,就传动系统而言,非常不推荐这么搭建
包含在启动器 FTC® 指南中的 pushbot 传动系统示例¶
4轮驱动(即后文所述4WD方案,WD意即“Wheel Drive”)¶
在最常见的形式中,传动系统使用与双轮传动系统相同的车轮布局(后部 2 个牵引轮,前部 2 个全向轮),但有一个显著区别: 四个车轮都有动力 。
有些参赛队伍会使用全部四个牵引轮或全部四个全向轮。不建议使用全部4个牵引轮,因为这种设置会导致转弯性能不良。这是车轮摩擦过大造成的。如果四个轮子都使用全向轮,机器人将围绕中心旋转,从而实现不可思议的转向性能。
术语
然而,这种优势也会带来牵引力的重大损失。因此,许多团队选择使用两个牵引轮和两个全能轮,以在快速转弯和牵引力之间取得平衡。与其他坦克传动系统相比,这种传动系统的主要优势在于,当机器人的中心高于地形时,它能够轻松地在凸起的地形上移动。
建议四轮驱动系统接近或正好是一个正方形。否则,可能会遇到转向问题。
备注
重量分配 也是一个需要考虑的重要因素:背部的重量越重越好。
术语
- 重量分配¶
重量分配一般是指机器人的重量比例。机器人的重量最好是50-50分配,即各占一半(50% 的重量在前半部分,50% 的重量在后半部分),这样传动系统就能获得最佳的操纵性和转弯性能。
偏离中心转弯可能是也可能不是缺点,但在四轮驱动车中几乎无处不在。这对车队来说可能不是问题,但最好还是注意一下。偏离中心转弯可能是一种优势,但需要注意的是,4轮驱动车的转弯速度会比6轮或8轮的同类车型稍慢。
优势¶
比2轮驱动更灵活
稳健的加速和牵引力
如果底盘升得足够高,就能穿越地形
良好的推力可用于防御,但机动性足以躲避推力
劣势¶
重心较高,比 6轮/8轮驱动更容易翻车
4个轮子全部都是牵引轮的4驱系统会降低操控性
机器人的转弯点和转弯半径与重量分配有关
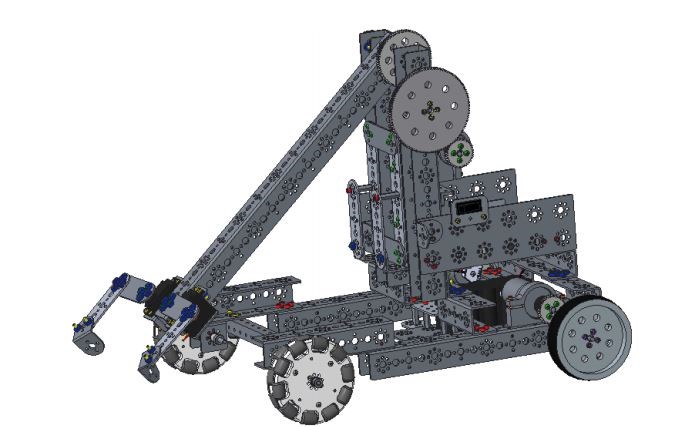
四轮驱动 CAD 示例(点击展开)

7209 Tech Hogs, Relic Recovery¶

10641 Atomic Gears, Rover Ruckus¶
六轮驱动(6WD)¶
六轮传动系统是 FTC 中常见的竞技传动系统,原因有很多:它具有出色的牵引力和转弯性能,而且由于有六个车轮,传动系统与地面的接触更多,有助于提高稳定性和牵引力。6 轮传动系统主要有两种类型:转角全向 和 投放中心 。
术语
- 投放中心¶
中心下沉式 6WD 方案是一种 6 轮驱动装置,其中心轮安装在略低于其他两个车轮的位置。落差应在 1/16 英寸以上至 1/4 英寸之间。不过,建议的落差约为 1/8”。通常情况下,轻型机器人(<25 lbs.)落差更小,而重型机器人 (>25 lbs.)的性能略好于 1/8 英寸以上的落差。
放下中间车轮的目的是确保始终只有 4 个车轮与地面接触。这是因为在 6 个轮子着地的情况下转弯会产生很大的摩擦力,很难快速转弯。请注意,所需的落差可能因场地条件和整个机器人的重量而异。
由于场地下方的材料不同,机器人的转弯性能会急剧下降,导致机器人比平时下沉得更多。
大多数降心六轮驱动装置都是使用定制的传动系统 制作的,因为使用基于套件的构建系统很难实现中心轮降心(基于 REV 的套件传动系统是一个显著的例外)。使用 goBILDA 和 Actobotics 的枕木块可以实现中心下降,但会比较笨拙。不过,有了新的 goBILDA 落心轴承板 ,就可以在 goBILDA 通道上直接制作落心传动系统。
带有转角 全向轮 的 6 轮驱动装置不需要中心定位装置。它试图通过用全向轮取代转角牵引轮来解决转弯问题,从而使传动系统能够实现更好的转弯,尽管牵引力略低于中心定位轮。这很容易在套件中实现,是一种出色的全能传动系统。中心下压轮和转角全向轮可以结合使用,以获得最大的转弯可靠性,不过这也会带来易摇晃和牵引力降低等副作用。
优势¶
强大的牵引力和可操作性
加速性能好,速度上限高
在所有机器人重量下都具有极高的稳定性
能够进行防守
劣势¶
使用基于 C形梁 的系统制造落心式 6WD 方案十分困难,不过使用 goBILDA 落心式轴承板 可以部分缓解这一问题。
落心式 6WD 方案转弯能力稍差,但牵引力更大
下降中心 6WD 方案取决于现场条件
使用转角全向轮的 6WD 方案的牵引力较弱
慢 齿轮比 会使 6WD 方案感觉迟钝
六轮驱动 CAD 示例(点击展开)

7236 Recharged Green, Rover Ruckus; 的投放中心 6WD方案¶

Ethan Doak,goBILDA 6 轮驱动,带转角全向车轮¶
8 轮驱动¶
八轮传动系统不如六轮传动系统常见,它结合了四轮和六轮传动系统中的元素。例如,6 轮传动系统通常会有一个下置的中心轮,这样机器人就可以用 4 个轮子而不是 6 个轮子来转动,从而减少摩擦,提高转弯机动性。
在 8 轮驱动的汽车上,中间的四个车轮是下置的。这意味着在转弯时,只有中间的四个车轮接触地面。因此,8 轮传动系统转弯时的稳定性比 6 轮传动系统略高,而 6 轮传动系统转弯速度更快。此外,由于 8 轮驱动的车轮与 4 轮驱动的车轮位于同一位置,因此它具有 4 轮驱动的稳定性。
建议为所有八个车轮提供动力,并使用 行星齿轮 电机,而不是 正齿轮 电机。
参赛队还可以选择在外侧四个车轮上使用双层全能轮。这样做可以减少牵引力/推力,提高机动性。
优势¶
兼具 6WD 方案的稳定性和 4WD 的灵活性
比 6WD 方案更稳定
出色的牵引力和加速度
非常适合防御
劣势¶
比 6WD 方案占用更多空间
为所有 8 个车轮提供动力可能很棘手
如果没有足够的中心落差,转弯速度会大大降低

3846 Maelstrom, Rover Ruckus¶

13075 Coram Deo Academy Robotics, Rover Ruckus¶
胎面驱动¶
履带驱动是指使用坦克履带或宽皮带为运动提供动力,就像现实中的坦克一样。遗憾的是,在 FTC 中,由于多种原因,这种传动系统并不具有竞争力。
胎面很复杂,有很多故障点。胎面也非常容易损坏,来自其他机器人的轻微撞击就足以使胎面错位。 商用现货 (COTS) 胎面的选择也不多–TETRIX 履带在用于机器人传动系统时容易断裂和脱轨,因此不适合在比赛中使用。
虽然有可能成功实施履带式驱动,例如下面的例子,但大多数缺乏经验的团队并不具备这样做的能力和技术诀窍。胎面驱动对牵引力的改善微乎其微,但却牺牲了机动性。要穿越地形,还有更好的选择,例如 4WD 方案。
优势¶
非常擅长穿越地形
出色的牵引力和推动力
劣势¶
机动性和最高速度较差
实施起来非常复杂
踏板容易破损和脱落

5975 Cybots, Res-Q¶