舵机使用技巧¶
下面是在 FTC® 中使用舵机的一些提示。
Pay attention to a servo’s travel range! The default 600-2400 range of the FTC control system when selecting the “Servo” configuration can make it appear that popular servos like the goBILDA Dual Mode Servos and REV Smart Robot Servos have less range than advertised. Make sure you select the “Full Range Servo” configuration instead to get the full 500-2500 range.
Servo wires usually are black-red-white or black-red-yellow. Matching the colors is an easy way to check if the servo is plugged in correctly. Most servo connectors provide no protection from plugging them the wrong way: if you rotate it 180 degrees, it will still fit - but the servo would not work. (It shouldn’t be damaged, though.) Thus, if your servo is not working, first check if they are plugged in correctly. Then check it again.
- 在使用 舵机 延长线时,请使用 固定夹 ,以防止在有人拉扯电线时连接脱开。或者,在紧要关头也可以使用电工胶带。
小技巧
Some vendors sell versions of the 3-pin female connector with retaining clips built-in. BackBayRC on Amazon sells pre-made servo extension wires with locking connectors; and Ferra Components sells both pre-made servo extension wires with locking connectors, and packs of locking connectors you can crimp yourself.
Do not use bare socket head screws to attach servos - when tightened, they will damage the plastic. Use button head screws or socket heads with a washer.
舵机 在承受横向负载或 轴 弯曲时很容易断裂。例如,如果不采取任何额外的预防措施,直接在 舵机 上安装机械臂或机械爪,很可能在机械臂伸长后第一次撞墙时就会折断 舵机 (这种情况不可避免地会发生)。
To avoid that, use additional supports. The easiest way to do it is by using ServoBlocks from goBILDA. ServoBlocks act as exoskeletons for the servo, providing additional support. They pay for themselves, since they help protect your servos from getting damaged. Additionally, REV offers the inside and outside channel servo bracket, which when paired with the aluminum servo shaft adapter and bearing assembly, fulfills the same function.

A servo in a compact ServoBlock¶
使用连接件。与其将旋转部件直接安装在 舵机 上,不如将其安装为可绕支点旋转,然后使用连杆将其连接到 舵机 上,如下图所示:
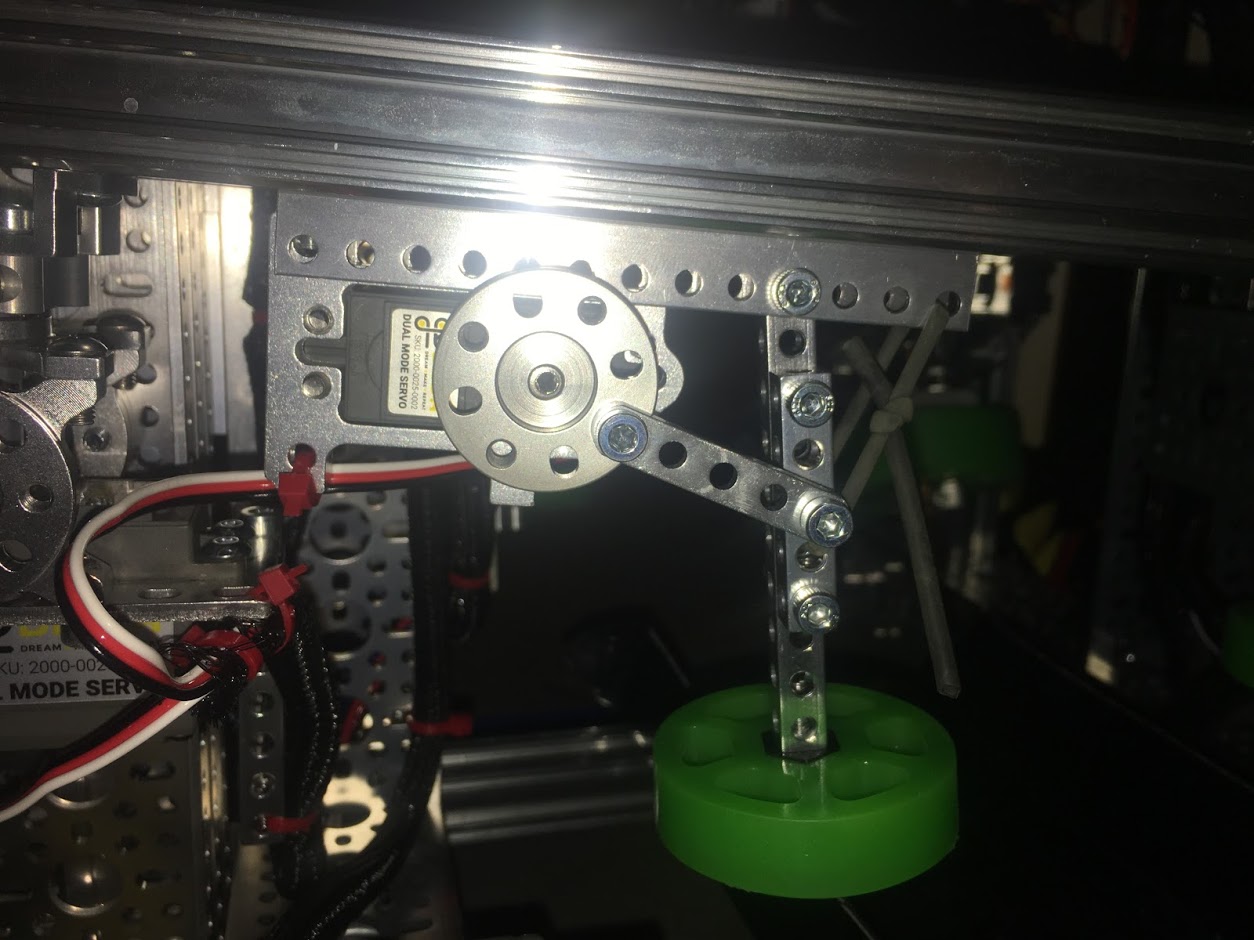
连杆示例,由 4137 Islandbots 队伍提供。使用 goBILDA 平梁作为连接装置。¶
If you need more power, use a REV Servo Hub or goBILDA 6V Servo Power Injector. This is important for servos under high load conditions.
术语
- 舵机电源模块¶
A Servo Power Module (SPM) is a device made by REV Robotics that boosts the voltage that the Expansion Hub provides to a servo. The Control/Expansion Hub’s output for servos is 5V at 6 amps, and the SPM boosts the voltage to 6V and up to 15amps.
注意
The Servo Power Module has a tendency to fail spectacularly, burning out the SPM, and sometimes the Control/Expansion Hub it is plugged into. Teams shouold use the newer REV Servo Hub or goBILDA Servo Power Injector instead.

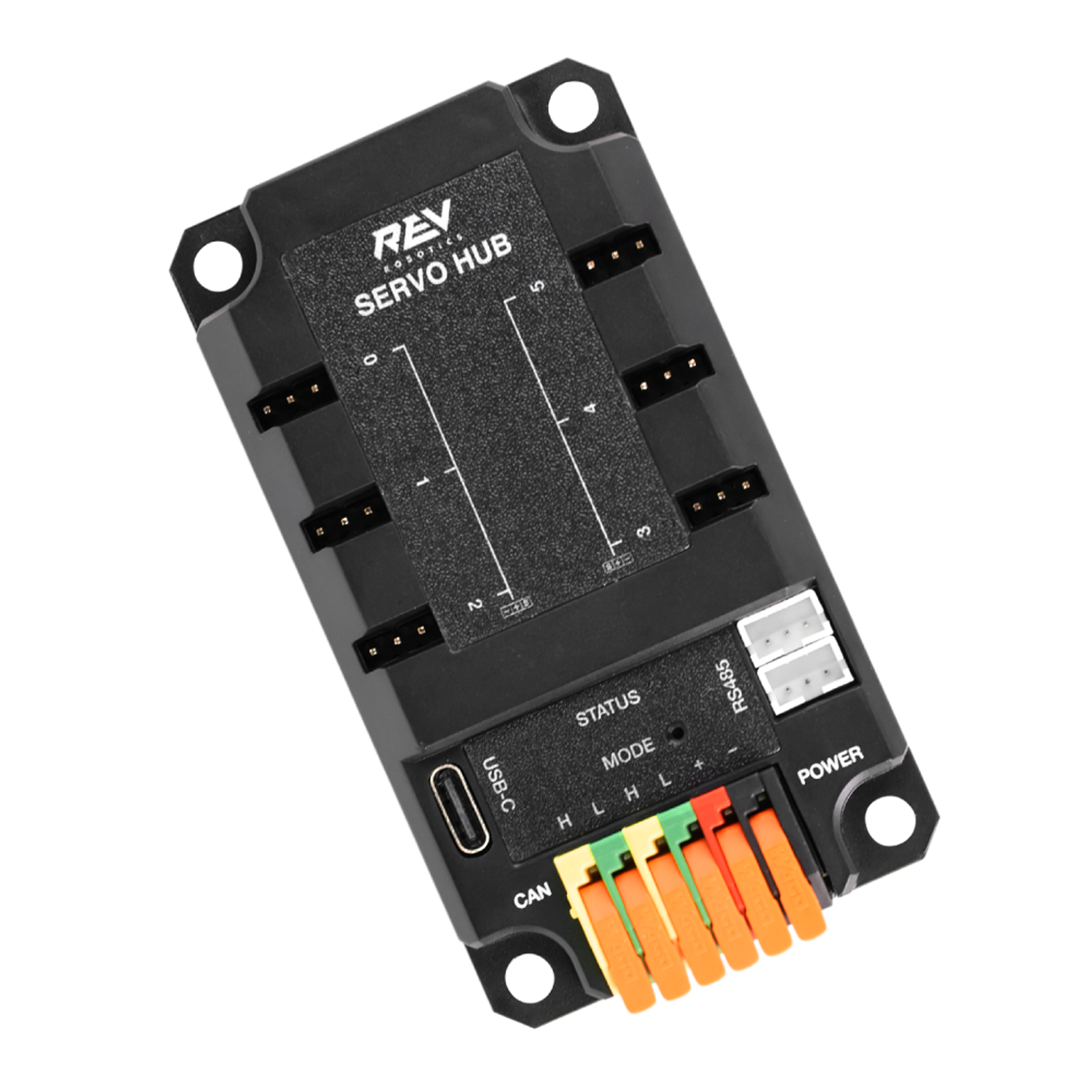
- Servo Hub¶
A Servo Hub is a device made by REV Robotics that is a controller like the Expansion Hub, but only controls servos. The Control/Expansion Hub’s output for servos is 5V at 6 amps, but the Servo Hub’s output for servos is 6V and up to 15amps.
小技巧
The Servo Hub can make wiring significantly easier in certain circumstances. For example, if you have an arm on a long extension that has 4 servos on it, you can run just the power wire and the data wire to a Servo Hub on the end of the arm, rather than running 4 servo extension cables the entire length.
- goBILDA 6V Servo Power Injector¶
A Servo Power Injector (SPI) is a device made by goBILDA that boosts the voltage that the Expansion Hub provides to a servo. The Control/Expansion Hub’s output for servos is 5V at 6 amps, and the SPI boosts the voltage to 6V and up to 24 amps total output. It works similarly to the original REV Servo Power Module, but with significant improvements to maximum output power and overcurrent handling to prevent failure.
