整体工程学动力传动系统#
麦克纳姆轮传动系统#
麦克纳姆传动系统由四个麦克纳姆轮组成,它们由一个电机独立驱动。这种结构可以调整每个轮子的速度,使机器人能够进行平移。
提示
- 麦克纳姆轮#
麦克纳姆轮是一种特殊的车轮,与传统车轮相比,它具有机动性和整体扫射功能。它们由一系列向左或向右旋转 45 度的橡胶滚轮组成。
在传统的机械传动系统中,一个对角线上的车轮与另一个对角线上的车轮运行方向相反,会导致车辆侧向运动。这些车轮运动的组合可以使车辆在任何方向上以任何车辆旋转(包括完全不旋转)的方式运动。
麦克纳姆传动系统的主要优势在于它的机动性,尤其是因为机器人可以平移而不是转弯行驶。麦柯纳姆车轮上的滚轮与车轮的旋转轴成 45 度角,这意味着麦柯纳姆传动系统的平移速度比不上前进速度。
这可以通过讨论相关的力来解释。每个轮子转动时,都会对地面产生摩擦力,从而推动机器人前进。前进时,两组左轮以相同的速度同方向旋转,两组右轮以相同的速度同方向旋转,这意味着力不会相互抵消。然而,在扫射时,两个左轮和两个右轮的旋转速度都不相同。在许多情况下,它们的旋转方向甚至相反。
这两种相反的力会导致滚轮打滑越来越多,从而以牺牲牵引力为代价(打滑越多,速度越低)使机器人的速度成角度变化。不过,在向前移动时,滚轮仍会打滑,但不会像扫射时那样剧烈。
这是机械传动系统的主要缺点:它们往往没有太大的推动力,因此容易受到坚固的坦克驱动装置的攻击。
由于对角滚轮的存在,麦克纳姆轮更容易打滑,因此在麦克纳姆驱动装置上可选择增加一个单独的测距装置,以便在自主运行时跟踪机器人的位置。
注意
值得注意的是,为了最大限度地提高机械手驱动装置的效率和稳定性,从上面看,每个轮子的滚轴应指向机器人的中心,形成 X 形,而不是菱形。
这样做的主要原因是,它可以使传动系统的转动速度明显快于其他方式。使用建议的设置时,从机器人底部看,滚轮形成一个菱形。这使得车轮施加在地面上的力与转弯半径相切,从而加快了转弯速度。
优势#
平移带来的出色机动性和敏捷性,可以很好地躲避防御
加速性能好,最高速度高
非常灵活的传动系统,几乎适用于任何比赛
缺点#
由于机械滚筒的摩擦系数低于牵引轮,因此牵引力较差;无法穿越地形
可能会在防守中被推来推去
车轮必须独立供电,因此没有冗余
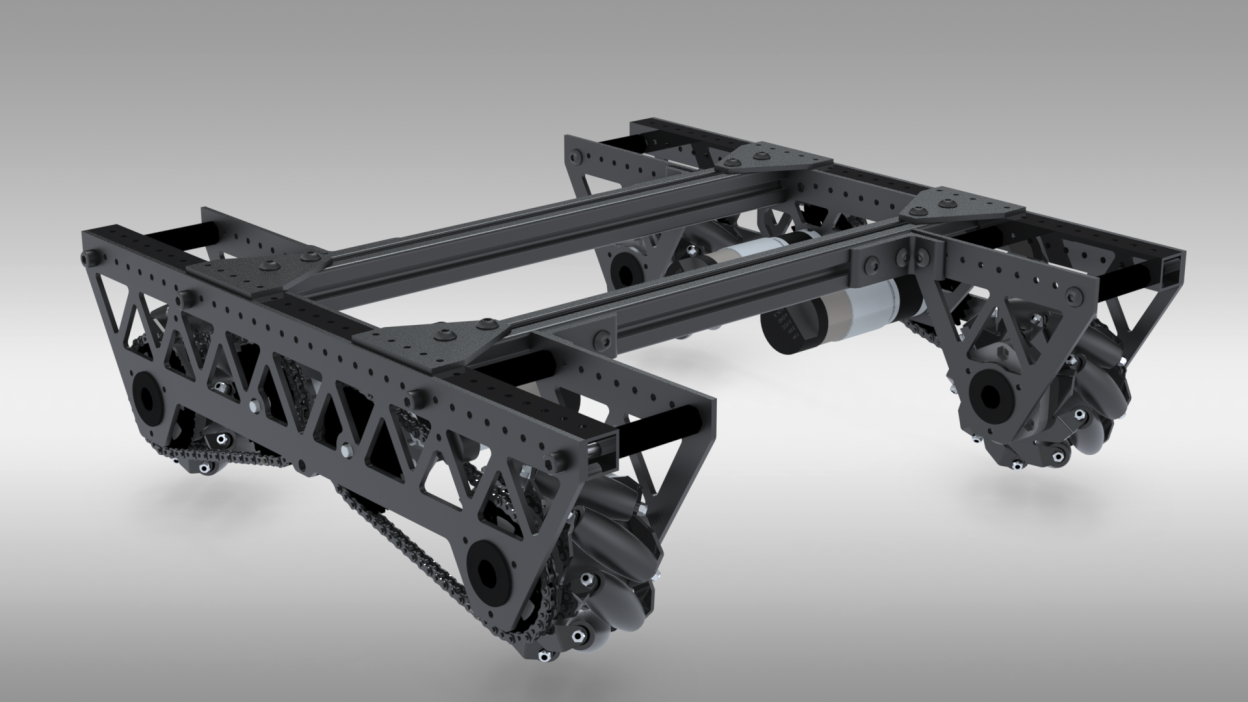
Mecanum Drive 的 CAD 示例(点击展开)
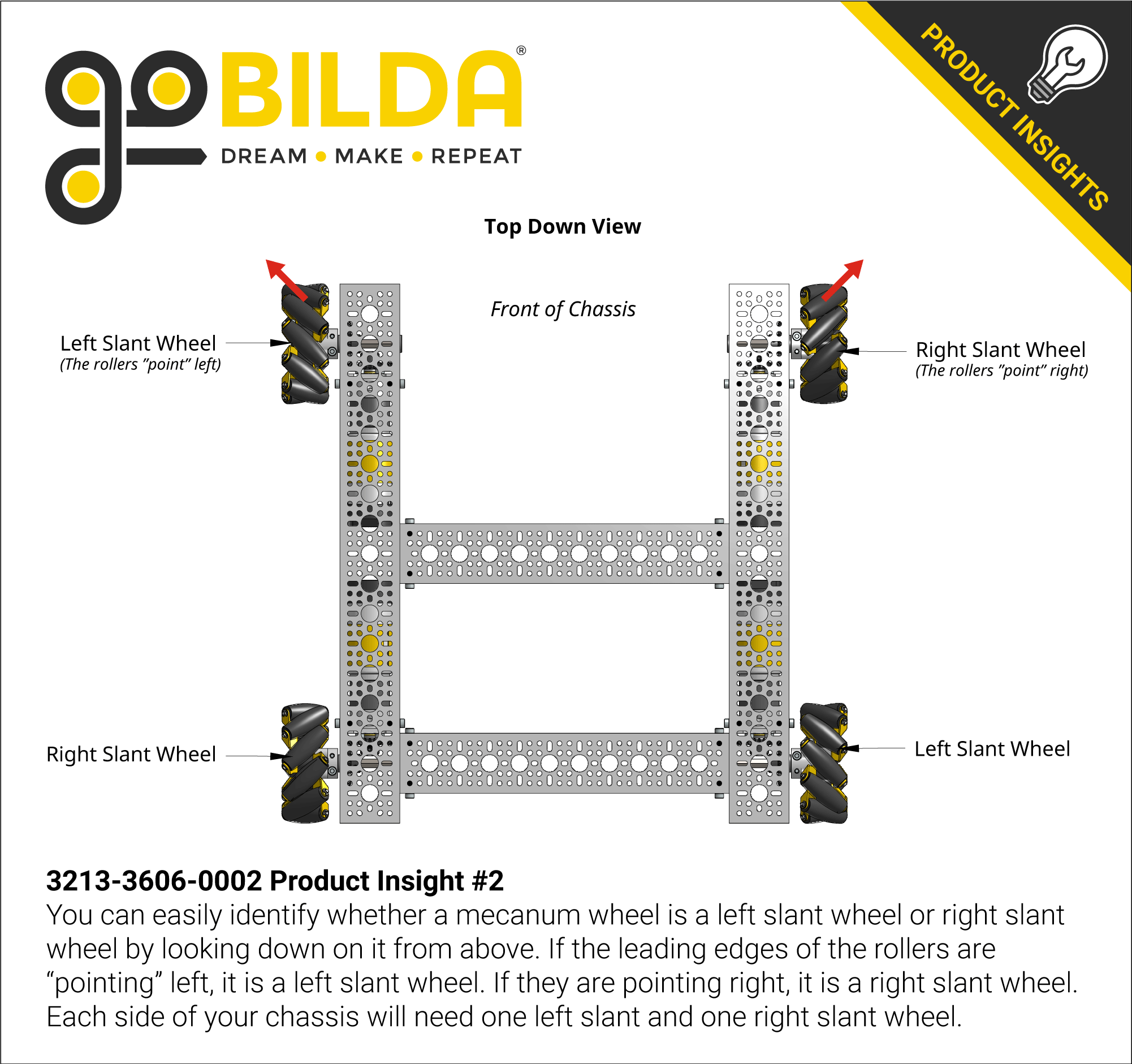
麦克纳姆轮的配置,goBILDA 提供#
麦克纳姆轮·微指南#
麦克纳姆轮最重要的特征之一是让滚子旋转的装置– bushings 或 ball bearings 。使用滚珠轴承的机械轮比使用衬套的机械轮更能飞,因为滚轮旋转时的摩擦更小。
备注
过去,一些车队曾投资购买直径为 6 英寸的麦克纳姆轮。这些轮子通常要贵得多,而且一般不会带来明显的性能优势。我们强烈建议使用轮径在 3 到 4 英寸之间的轮子。
推荐#
这些车轮是麦克纳姆轮的黄金标准,如果您要购买新的麦轮,几乎没有理由不从这部分购买任何麦轮。
goBILDA Mecanum Wheels v2 (127.49 美元,有团队折扣):goBILDA v2 Mecanum 轮圈是追求全方位优质设计的车队的黄金标准。它们的直径为 96 毫米,厚度为 38 毫米,滚珠轴承支撑、硬度为 70A 的滚轮可提供出色的平移性能。由于使用了 16x16mm 和 32x32mm 的凹孔,这些轮子有最多的安装选择,可适用于 FTC® 中常用的所有轴型。
REV Robotics Mecanum Wheels (127.50 美元,可享受团队折扣):REV Robotics Mecanum Wheels 的直径仅为 75 毫米,为 FTC 团队提供了更小的 Mecanum Wheels 选项;不过,它们并不是最薄的选项,厚度仅为 40.8 毫米。它们采用滚珠轴承支撑滚轮,可提供出色的扫射能力和牵引力。这些轮子上的孔型与 Andymark Nubs 以及 REV Robotics 通用六角适配器 v2(已包括在内)兼容;但是,要使用其他轴选项,可能需要使用适配器或进行物理改装。
可行方案#
这些麦克纳姆轮的性能可以接受,但目前购买它们的理由并不充分,因为它们已经被更好的机械手取代。如果您已经拥有它们,它们是一个可行的选择,但也可以考虑 “推荐 “部分中的一些麦克纳姆轮。
Nexus 滚珠轴承 麦轮 (134.00 美元):这些轮子直径 100 毫米,宽 59 毫米。由于使用了滚珠轴承,它们的平移性能非常出色。不过,它们比推荐的轮子更贵,占用空间更大,牵引力更小,而且更难安装。
goBILDA Mecanum Wheels v1 (已停产):这些轮子与 Nexus Ball Bearing Mecanum Wheels 非常相似,但配色不同,安装方式也更好。
Andymark Heavy Duty Mecanum Wheels (225 美元):这些轮子是清单上最昂贵的轮子。这些轮子直径为 4 英寸,宽 1.65 英寸。这些轮子就是基于衬套的麦轮,因此虽然它们的打击性能不错,但仍然比基于轴承的轮子差。它们有很好的牵引力,比 Nexus 轴承或衬套车轮更大。
Nexus Bushing Mecanum Wheels (80.00 美元):这是使用衬套而不是滚珠轴承的 Nexus Ball Bearing Mecanum Wheel。除了扫射效果不错,但比滚珠轴承的同类产品差一些之外,没有什么可说的。
不推荐#
几乎没有理由使用这些麦克纳姆轮–它们的性能非常差,而且价格也不比 “推荐 “部分的机械轮便宜多少。我们不建议在 FTC 机器人上使用这些轮子,如果可能的话,请更换为 “推荐 “部分中的轮子。
TETRIX Mecanum Wheels (149.00 美元):这些麦轮采用基于衬套的硬塑料滚轮设计,因此平移性能较差。集成式轮毂是一种基于固定螺丝的圆孔设计,不仅不可靠,而且占用额外空间。
Andymark Standard Duty Mecanum Wheels ($77.00):这些轮子几乎不能平移,而且非常脆弱。
8103 Null Robotics, Rover Ruckus, 使用 Nexus mecanum 轴承#

731 Wannabee Strange,Rover Ruckus,使用 AndyMark HD mecanum 车轮 。#
X-Drive#
X-Drive 是一种基于整体工程学的全方位轮驱动系统。这种驱动方式是在机器人的一角以 45 度角安装 4 个全向轮。
X-Drive 和 mecanum 的一个显著区别是转向速度。正如麦克纳姆轮部分所述,扫射速度与前进速度的比值明显小于 1,而 X-Drive 上的比值正好是 1,这是因为车轮位置的旋转对称性。这意味着 X-Drive 机器人的扫射速度和前进速度相当。然而,当以 45 |deg|(约为 \(\frac{\sqrt{2}}{2}\) 的前进速度)进行扫射时,传动系统的速度会变慢。
尽管 X 驱动具有良好的转弯和加速性能,但其主要缺点在于包装/外形尺寸。包装指的是传动系统与机器人整体设计的匹配程度。
理想情况下,传动系统应占用尽可能少的空间,以便于围绕其设计机构。由于全向轮是偏置的,因此 X 驱动器的包装比其他类型的整体驱动(如机械传动或 H 驱动)更加困难。此外,由于包装奇特,从电机到车轮的动力传递也相对困难,这意味着大多数 X-Drive 最终都是直接驱动,这对电机齿轮箱的使用寿命不利。
备注
使用 X-Drive 系统时,机器人向前/向后/直向移动的速度 \(\sqrt{2}\) 要比车轮处于正常方向的传动系统(具有相同的齿轮比和车轮尺寸)快一倍。
有关具体原因的解释,请参阅 this analysis 。
优势#
良好的机动性和灵活性
加速性能良好
缺点#
易被防守,容易被推来推去
由于外形笨拙,通常使用直接驱动

731 Wannabee Strange, Velocity Vortex#
5040 Nuts and Bolts, Relic Recovery#
H-Drive#
H-驱动(根据配置不同,也称为 U-驱动)是一种使用全向轮的整体工程学驱动。H-Drive依靠一组与前进/后退轮垂直的”扫射轮”来实现扫射。H-Drive类似于坦克传动系统的融合,同时保留了整体工程学传动系统的机动性和扫射功能。
H-Drive理论上非常容易编码,但大多数团队都会使用某种陀螺仪校正来进行直线扫射,尽管在重量分配合理的情况下并不需要这样做。
H-Drive有多种可能的电机配置–每个前进驱动舱可安装1或2个电机,扫射轮可安装1或2个电机。与机械传动相比,H-Drive在每个前驱动吊舱上安装一个电机的配置下,加速度略有降低。
为了获得尽可能高的可靠性,许多FRC® 团队会将它们的扫射轮悬挂在摇杆系统上,以确保机器人不扫射时所有轮子都与地面接触。
到目前为止,H-drive的最大优势在于它能够适应多种电机分布。例如,如果您只想将3个电机专用于您的机械装置,而且还有一个电机剩余,那么使用1个扫瞄电机、4个驱动电机的配置绝对可行。或者,如果您想为机械装置分配 5个电机,那么使用2个驱动电机和1个扫瞄电机的H-drive绝对是最佳选择。
优势#
兼具油箱和整体式动力传动系统的优势
可与3或5个电机一起使用
良好的牵引力和最高速度
出色的机动性和灵活性
缺点#
扫射的效果略逊于麦克纳姆轮
偶尔需要复杂的悬挂系统,视设计而定

9804 Bomb Squad, Relic Recovery#