机械臂¶
机械臂包括各种各样的机械装置。在 FTC 中,它们用于增加末端效应器的伸展性和灵活性。当机械臂与线性伸展和小关节发射装置等其他机构搭配使用时,其功能尤为强大。
伸展机械臂¶
机械臂可以是一个有用的伸展工具。长机械臂需要较大的减速比来驱动。在 :ref:` 单臂部分<single-arm>` 中的示例使用了 254.5:1 的减速比。建议通过齿轮、链条或皮带将扭矩传递到机械臂,而不是直接安装到电机轴上,因为这样可以获得更大的轴向力和减速比。由于这些机械臂可携带较大的动力,如果突然停止,可能会导致电机齿轮箱损坏,甚至使机器人翻倒。软件控制有助于减轻电机齿轮箱的负荷(参见 控制回路)。
根据应用和实现,机械臂可能比延伸方案更快或更慢。
单机械臂¶
单机械臂是最简单的机械臂类型,指的是只有一个旋转轴的机械臂。这种机械臂的制作相对简单快捷,但作为主要的延伸系统,它们在高级别竞技比赛中的可行性不高,因为由于起始立方体的长度限制,它所提供的延伸能力有限,只能提供大约 16 英寸的延伸,而大多数游戏都需要超过 24 英寸的延伸。

goBILDA 启动机器人,Into The Deep,单机械臂用于伸展。¶
枢轴延伸¶
枢轴延伸机构是一个连接有线性延伸装置(通常是线性滑轨)的机械臂。这样,线性伸展装置就可以为水平和垂直伸展提供所需的伸展长度,同时无需使用传送结构。

goBILDA 机器人 3 天内完成,Into The Deep,旋转线性滑轨¶

19098 Eastern Foxes,Into The Deep,Winning Alliance First Pick(富兰克林),可转动线性滑轨¶
8417 ‘Lectric Legends,Rover Ruckus,入围联盟第一名(于 Ochoa 奥乔亚举办),单臂 + 定制皮带驱动线性延长杆¶
多轴臂¶
多轴机械臂由多个旋转关节组成。多轴机械臂除了具有单轴机械臂所缺乏的延伸能力外,还能更灵活地定位末端效应器。虽然多轴机械臂似乎是解决单轴机械臂所面临问题的明显方案,但其设计、制造和控制难度要大得多,存在精度、反向间隙和封装等问题,而且与线性滑轨和其他延伸方法相比几乎没有任何优势。
警告
对于缺乏经验的 FTC 团队来说,这种做法是非常不可取的。

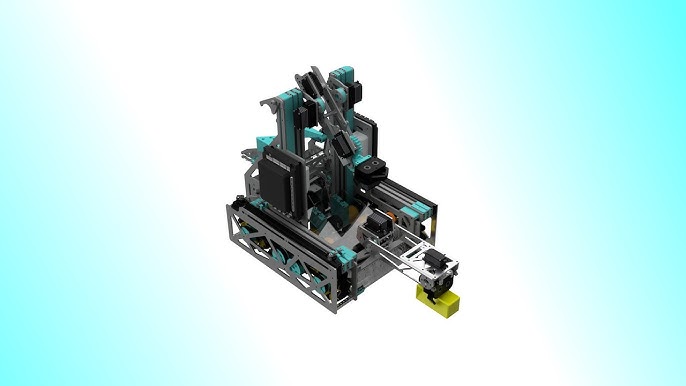
11146 Barker Redbacks,Into The Deep,多轴机械臂¶
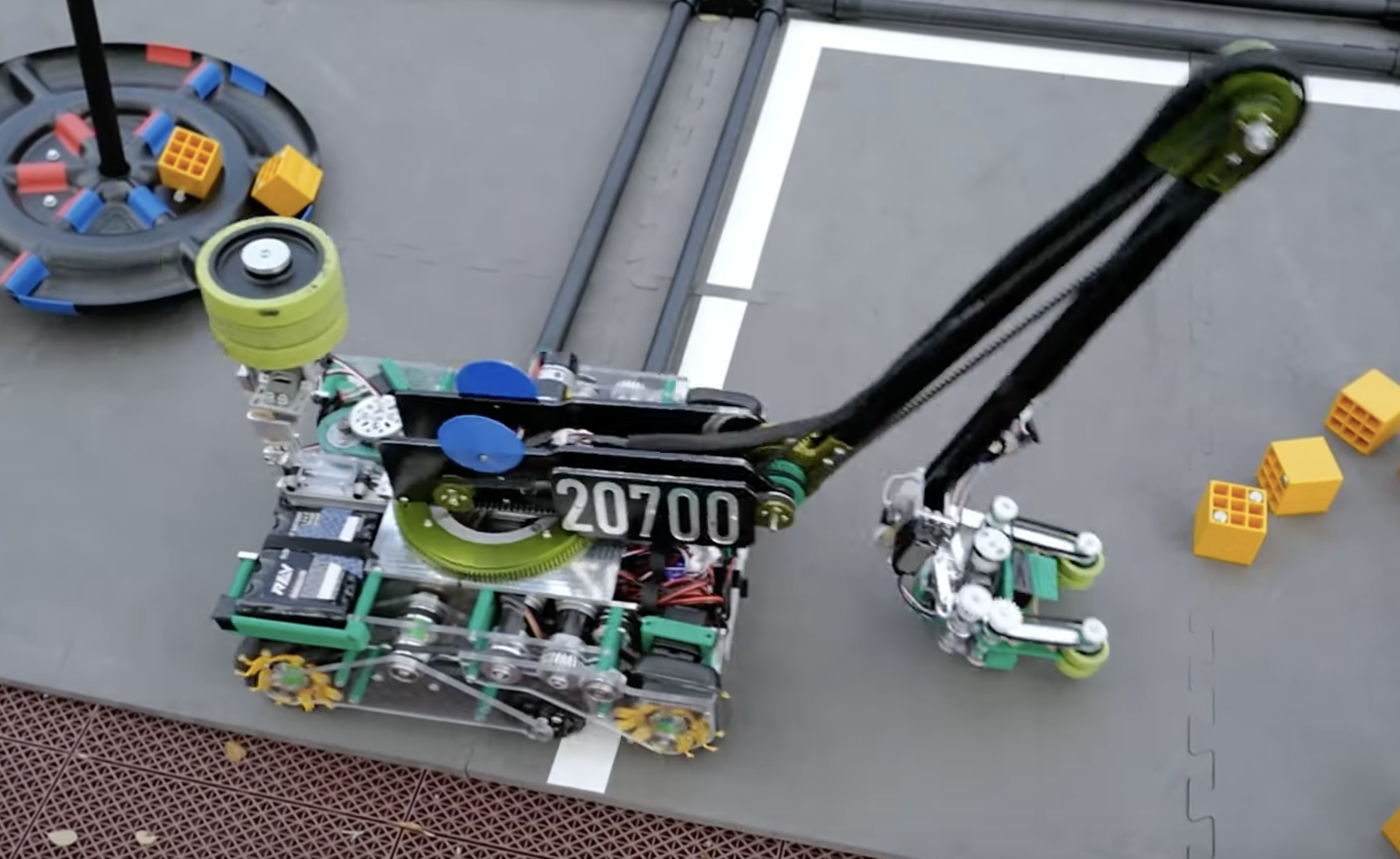
20700 Snap,Freight Frenzy,多轴机械臂¶
末端执行器机械臂¶
机械臂是为末端效应器增加灵活性和控制性的最常见方式。这些机械臂通常具有一个或多个旋转接头或线性延伸装置。由于这些机械臂所需的功率相对较小,因此通常由伺服电动机而非电机驱动。
注意
末端效应器很可能会发生碰撞,而且以机械臂作为杠杆,必须格外小心,正确安装和支撑这些舵机(参见 舵机使用技巧)。
单轴和多轴机械臂可以增加对末端效应器垂直和水平距离的控制。在 Into The Deep 中,这种机械臂在拾取装置很常见,可以让水平延伸的拾取装置越过水下障碍物,然后 “伸手向下 ”取样。这种机械臂可用于将拾取装置和发射装置排成一线,以方便转移,或者通常只是增加末端效应器作用位置的灵活性。
线性延伸通常出现在发射装置上,以增加机器人的存放范围。
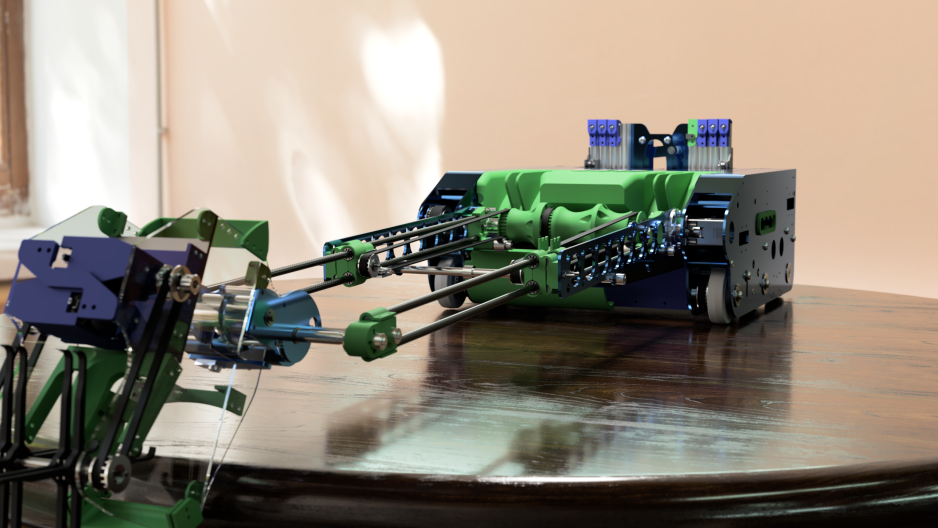
15972 TehnoZ,Into The Deep,入围联盟队长(Edison),拾取装置和发射装置都使用了双机械臂,发射装置使用了线性延伸。¶
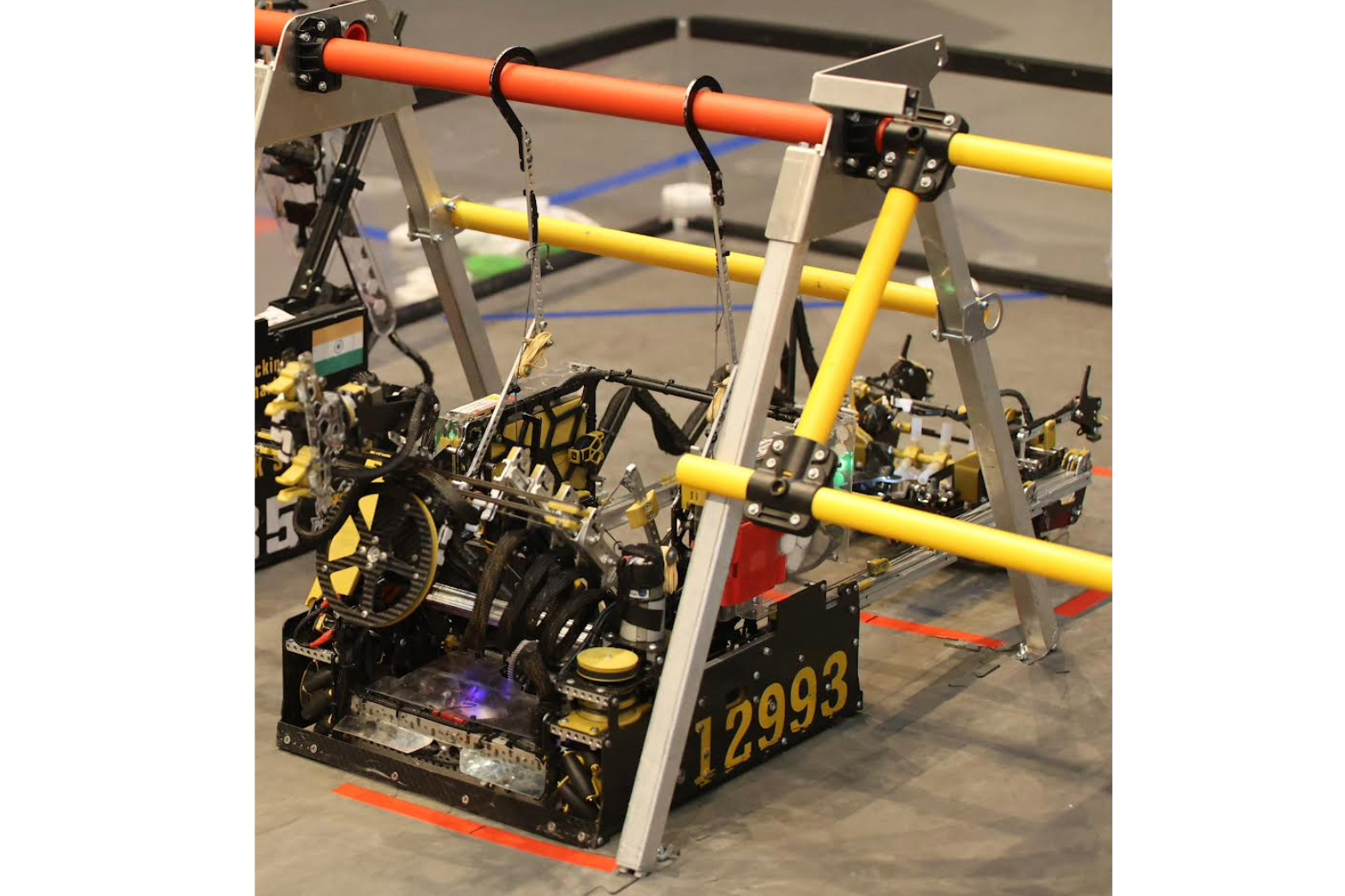
12993 RoboKings Aurum,中心舞台,入围联盟第 1 轮选拔赛,高自由度摄取机械臂,带水平伸展功能。¶