连杆机构¶
有许多不同类型的连杆类型。通常,连杆机构用于将旋转运动,例如舵机或电机的运动转换为线性运动。连杆机构可以有效地做到这一点,并且具有专门的运动模式,可以使它们成为某些机构的理想选择。
术语
- 连杆¶
通过铰链、滑动接头、球窝接头等连接到两个或多个其他链节上的实心链节或杆件系统。从而形成一个封闭链或一系列封闭链。一般用于将线性运动转换为旋转运动或反之亦然。
考虑因素¶
在构建连杆系统时,有几个方面需要考虑。
过中心是指连杆旋转时超过其中心点(通常是连杆两杆平行的点)。将连杆机构转过中心点有一些好处,例如可以使连杆机构更难反向驱动。有关这方面的更多详情,请参阅此 youtube 信息视频 。从本质上讲,连杆可以形成一种结构,在这种结构中,推动连杆可以移动机器人,而不是旋转连杆。
连杆机构不会有恒定的线速度或力。它们通常在杆垂直时达到最大速度和力,并且随着连杆机构旋转得更远,速度和力会减小。
将连杆机构进行建模对检查联动装置是否能达到您的要求非常有用。有关如何在 OnShape 中设置配合的示例,请参阅此 youtube 视频 。
常见连杆类型¶
滑轨连杆¶
连杆的一个常见用途是驱动线性延伸。这允许一种紧凑的方法将电机或舵机的旋转运动转换为线性运动,移动抽屉滑轨等机构。通常,带有多度球连杆部件的两杆连杆机构用于构建这些连杆机构。
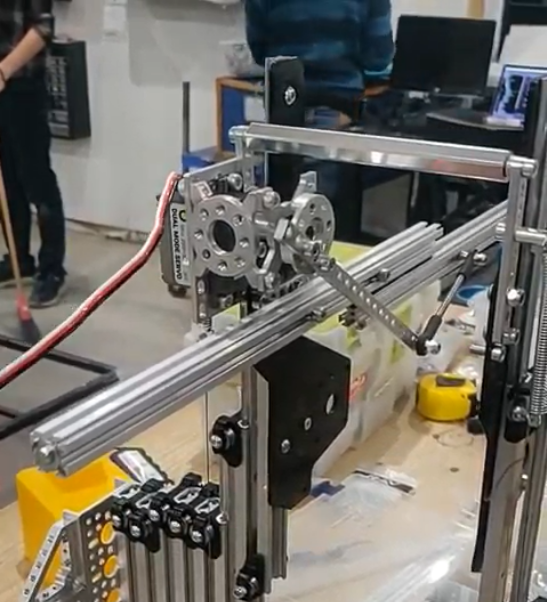
7236 Recharged Green, Skystone¶
四连杆¶
一种类型的连杆称为四杆连杆。这是一种使端杆始终与地面保持相同角度的连杆。例如,如果虚拟四杆的端杆在缩回时与地面平行,则它将始终与地面平行,即使完全旋转出去。这对于像爪子这样的机构是有益的,您希望在操作过程中与地面平行。此外,四杆可以在机器人框架之外提供延伸,并且由于机械臂跟随的“弧线”,通常提供垂直和水平延伸。此外,可以仔细选择杆的构造材料以节省重量。
由于空间要求,这种机构在FTC中没有广泛使用。保持末端杆平行的连杆将四杆的行程限制在180度以下(两个方向都小于90度),没有专门的机械结构,并且杆还占用机器人框架中的空间。
四杆CAD示例(点击展开)
虚拟四连杆¶
四杆连杆更受欢迎的替代方案是虚拟四杆。虽然从技术上讲不是连杆,但虚拟四杆使用链条或皮带来创造类似于四杆的效果,其中末端执行器始终与地面保持固定角度。因为不需要额外的杆,这种“连杆”可以移动超过180度,并且比传统的四杆连杆占用的空间更少。
这种机构更广泛地应用于FTC,因为它很容易添加到臂上,以保持末端执行器相对于地面的角度。
注意:链条和皮带都可以用来构造一个虚拟的四杆,使用它们都没有具体的好处。由于链条不必完全围绕链轮旋转,可以使用拉链来拉紧链条,使构造更容易。
虚拟四连杆CAD示例(点击展开)

7244 OUT of the BOX Robotics, Ultimate Goal¶
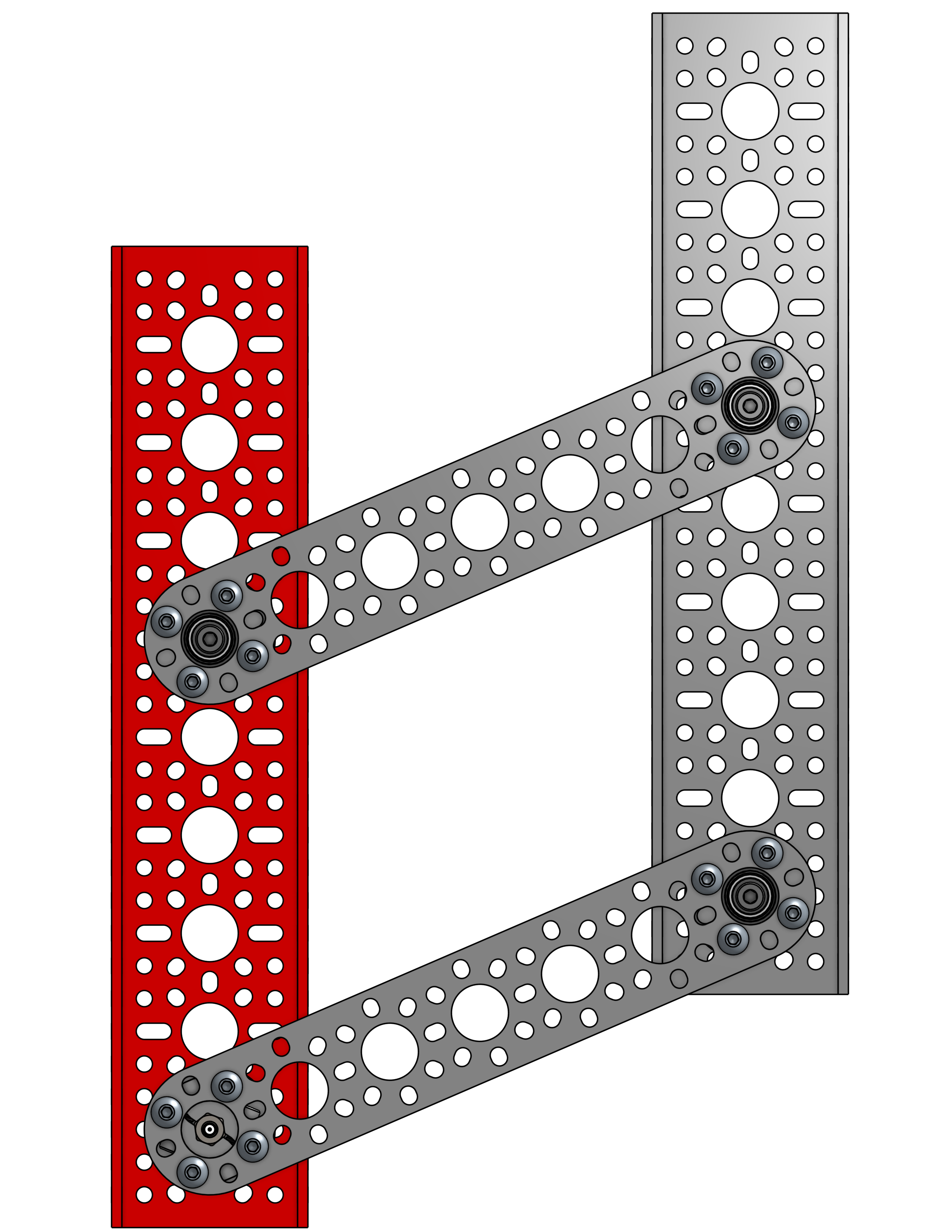
双反四杆¶
双反向四杆是四连杆的延伸,允许更多的延伸。双反向四杆由一个四连杆组成,第二个四连杆安装在第一个连杆的末端。这允许纯线性延伸,而不是单个四杆将采取的“弧形”。由于纯线性延伸,末端执行器仍将与地面保持固定角度。
由于所需空间通常很大,这种机构在FTC中没有广泛使用,但它是一种相当紧凑的产生大量线性延伸的方法。需要注意的是,双反四杆的每一侧都被平等地驱动,这样就不会出现不对称提升的问题。

11115 Gluten Free, Skystone¶
虚拟双反四杆¶
与虚拟四杆类似,虚拟双反四杆是一种连杆机构,它使用皮带或链条来代替双反四杆的连杆机构。虚拟双反四杆只是一个虚拟四杆机构,其中末端执行器链轮/皮带轮的尺寸是静态链轮/皮带轮的一半,导致2:1的驱动比。然后,将一根杆安装到末端执行器链轮/皮带轮上,并运行另一条链条/皮带,这创造了纯粹的线性运动,末端执行器始终与地面成相同的角度。这比双反四杆产生了更紧凑的线性运动,并且还可以向两个方向延伸。
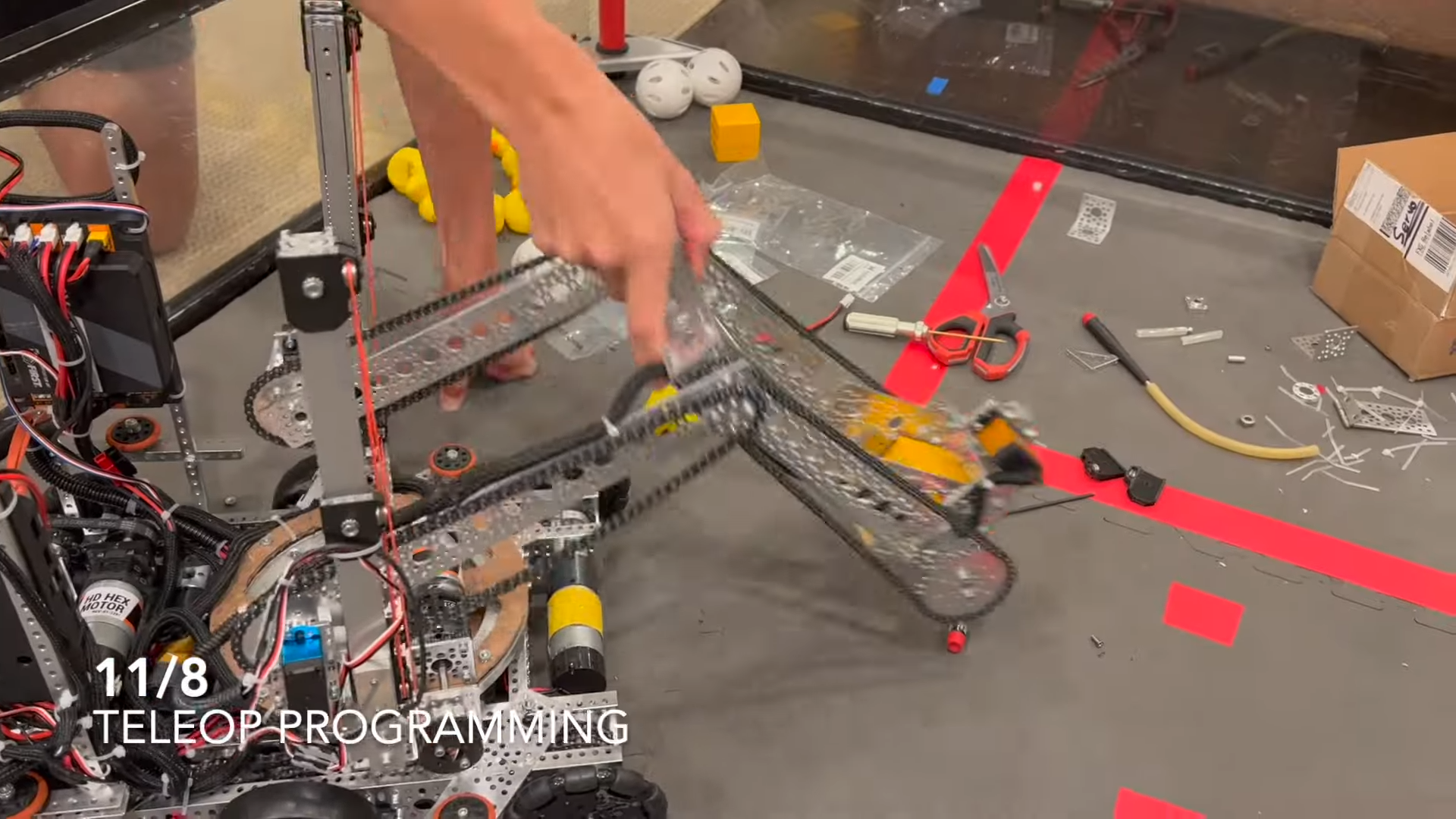
8644 Brainstormers, Freight Frenzy¶