无动力(全向)轮#
警告
这是 FTC® 设计中一个非常小众的方面。一般来说,经验丰富的团队才会这样做,因为他们有时间在休赛期反复用软件测试自己的设计和机制。
术语“无动力轮”、“跟踪轮”、“内置里程计轮”和“里程传感器”在FTC社区中经常混淆使用。然而,必须记住几个关键区别。里程计是一个总称,指的是使用运动传感器进行定位目的的一般性使用。与此同时,“无动力轮”、“跟踪轮”和“内置里程计轮”都是同义词。
术语
里程计是指使用运动传感器进行定位。定位是一种能够在某个时间点确定机器人位置的方法。在路径跟踪和高级自主模式中,定位至关重要,因为人们需要知道自己在哪里,才能做出必要的动作,到达所需的目的地。 定位软件 在测距中起着重要作用;但是,为了产生精确的结果,可靠和精确的硬件设计是必不可少的。
里程计最简单的形式是驱动编码器定位。这是使用编码器测量驱动传动系的电机的旋转。一个人能够读取编码器数据,并通过特定传动系的运动方程来获取身体的速度。驱动编码器定位通常非常简单,易于设置,因为几乎所有FTC的合法电机都有内置编码器。设置驱动编码器定位只需插入电线,无需额外的硬件。
社区中的许多团队已经聚集在一个独特的解决方案上,这个解决方案在FTC之外并不常见:使用“无动力全向轮”、“跟踪轮”或“内置里程传感器的全向轮”(这些术语都是同义词)。这些是指连接到编码器传感器上的小型“无动力全向轮”或非驱动(不是由电机驱动)车轮。两个或三个无动力全向轮的里程计通常会通过内置弹簧弹跳反应地面位置以确保准确的跟踪。两轮设计使用一个平行和一个垂直里程计(相对于驱动轮轴平行和垂直),分别测量x和y运动。航向的变化通过陀螺仪测量。三轮设计使用两个平行和一个垂直里程传感器,分别测量x和y运动。然而,这种设计放弃了陀螺仪,而是通过与两个平行车轮的差异来测量航向。这在FTC控制系统中通常更准确,因为BNO055IMU(用于两轮设计中的陀螺仪)使用I2C,其速度比REV集线器上的其余I/O慢,并且无法批量读取。这两个问题会导致微小的偏移问题,这些问题会随着时间的推移而加剧,从而在使用两轮设计时导致更不准确的定位系统。
然而,设计始终准确的无动力轮被证明是一项艰巨的设计挑战。它通常相当昂贵。一套三个死轮在任何硬件之前,仅编码器就至少要花费100美元。
让我们来回顾一下每个系统的优缺点。
驱动器编码器定位#
优点:
便宜(你使用的电机很可能已经内置了编码器)
方便
几乎不需要配置
缺点:
由于麦克纳姆轮缺乏牵引力,麦轮驱动装置上的编码器定位可能非常不准确。
会在麦轮驱动的高加速度下偏移。如果加速度有限,对于基本的自主模式,精度将足够好
两轮内置里程计轮#
优点:
比3轮设计便宜
相当准确
不需要调整航向
缺点:
比3轮设计更容易偏移
三轮内置里程计轮#
优点:
相对精确的跟踪。在30秒的自主模式下非常准确
缺点:
相当昂贵
调整机器朝向(事实上是我们操控机器时常用的‘头’)是非常重要的
编码器#
软件中完成的许多定位依赖于编码器的读数。编码器是跟踪“计数”或“滴答”的传感器,滴答是代表一定旋转量的值。不同的编码器每转可能有不同的计数(CPR),有时也称为每转滴答。计数数量越多,数据就越精确。
编码器插入REV集线器中的JSTPH端口。这些编码器可以内置在电机上,也可以是外部的。外部编码器仍然需要插入编码器端口,但与该端口中的电机无关。通过软件,我们可以使用电机对象来确定编码器的位置。这应该用不使用编码器的电机来完成。如果你使用无动力轮,你将不需要驱动电机编码器端口,所以这些是你可能想要使用的潜在端口。
如果选择设计无动力轮,只有两种推荐的编码器可用于FTC:REV通孔编码器和美国数字S4T编码器。
REV通孔#
通常缺乏“REVcoders”或“recoders”, REV通孔编码器 已迅速成为FTC社区事实上的选择。REV编码器因其相对便宜、可靠性大大提高和易用性而获得这样的声誉。通孔设计被证明是对以前光盘编码器设计的重大改进。光盘编码器非常脆弱,容易刮伤,并且对设计缺陷的容忍度要低得多。

REV 通孔编码器#
优点:
通孔设计非常坚固且易于设计
相对便宜
高CPR
接线简单
缺点:
相对于其他编码器相当大。创建紧凑的设计可能具有挑战性
许多通孔在旋转时似乎遇到轻微的不均匀阻力。REV说这是正常的,随着编码器的磨损会消退
要在REV通孔编码器中强制磨损,可以在通过编码器的钻头上旋转1/2”六角轴几分钟
刁钻的安装点
美国电子编码器S4T#
在 S4T 微型轴编码器是死轮设计中使用的另一个可行的选择。这些编码器非常小,可以显著减少死轮设计的占地面积。传动这些编码器是防止冲击载荷的理想选择。

S4T 编码器#
***优点:
非常紧凑
缺点:
更贵(几乎是价格的两倍)
不太耐用
非常细的电线。如果没有固定好很容易断裂
理想情况下需要外部齿轮
SRX Mag编码器#
Cross The Road Electronics 公司的 SRX Mag Encoder 是一种磁编码器。由于其使用复杂度稍高,而且缺乏以 FTC 为中心的文档,因此很多 FTC 团队都没有使用它。它在 FRC 中更受欢迎。

CTRE SRX Mag Encoder#
优点:
非常紧凑
相对便宜
缺点:
需要组装
没有多少可用于FTC的信息
美国电子E8T编码器(已弃用)#
曾经是大多数FTC团队事实上的选择,E8T 光学编码器不再被推荐,因为REV通孔是同等价格的卓越选择。这些编码器的开孔光盘设计面临许多令人沮丧的设计缺陷,这些缺陷使它们非常脆弱,容易断裂。与REV通孔相比,它们唯一的优势是占地面积更小。

E8T 编码器#
设计#
很少有开源的无动力轮设计。无动力轮通常是围绕团队自己的传动系统设计的,FTC团队很少公开发布自己的机器人CAD。
以下是一些公开可用的无动力全向轮设计:
18219 的开放式里程计
利用REV通孔编码器
最流行和最强大的公开可用设计
紧凑到足以放入goBILDA通道
需要考虑的事项:
使用来自澳大利亚的Rotacaster 35mm车轮。运输可能需要一段时间
goREVdometry
利用REV通孔编码器
紧凑到足以放入goBILDA通道
需要考虑的事项:
信息只能通过他们的Discord频道获得
已经有一段时间没有迭代了
11115 Gluten Free Design - 2019
https://drive.google.com/file/d/16ZQRSiWdzTKSH92VpKrxKpXy3TTh0sA5/view?usp=sharing
以上链接2018-19赛季11115的CAD的整个机器人组件
需要考虑的事项:
使用 LEGO® 齿轮
用US电子S4T(相当昂贵)
9794 Wizards.exe Design
紧凑到足以放入goBILDA通道
不再推荐使用E8T
弹簧绷紧#
强烈 建议你的无动力全向轮设计包括某种形式的弹簧绷紧,将车轮推入地面。这确保车轮始终与地面接触并具有足够的牵引力。需要足够的力来确保恒定的牵引力以防止车轮打滑。请记住,太大的力可能会将轻型驱动列车抬离地面并扰乱驾驶。
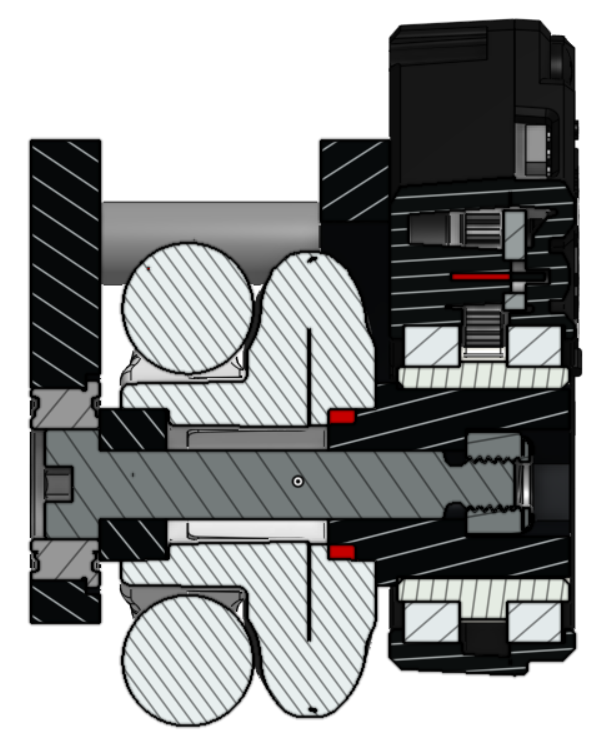
最流行的弹簧绷紧方法是将里程计围绕一个点枢转,并通过弹簧或橡皮筋提供旋转力。
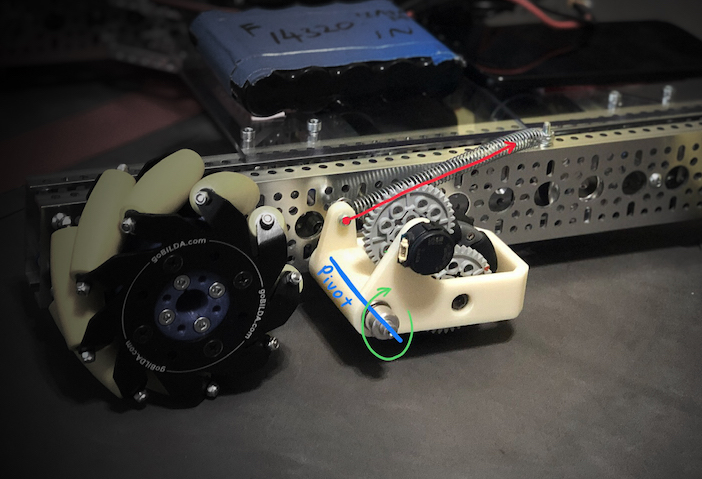
FTC 14320’s spring tensioning#
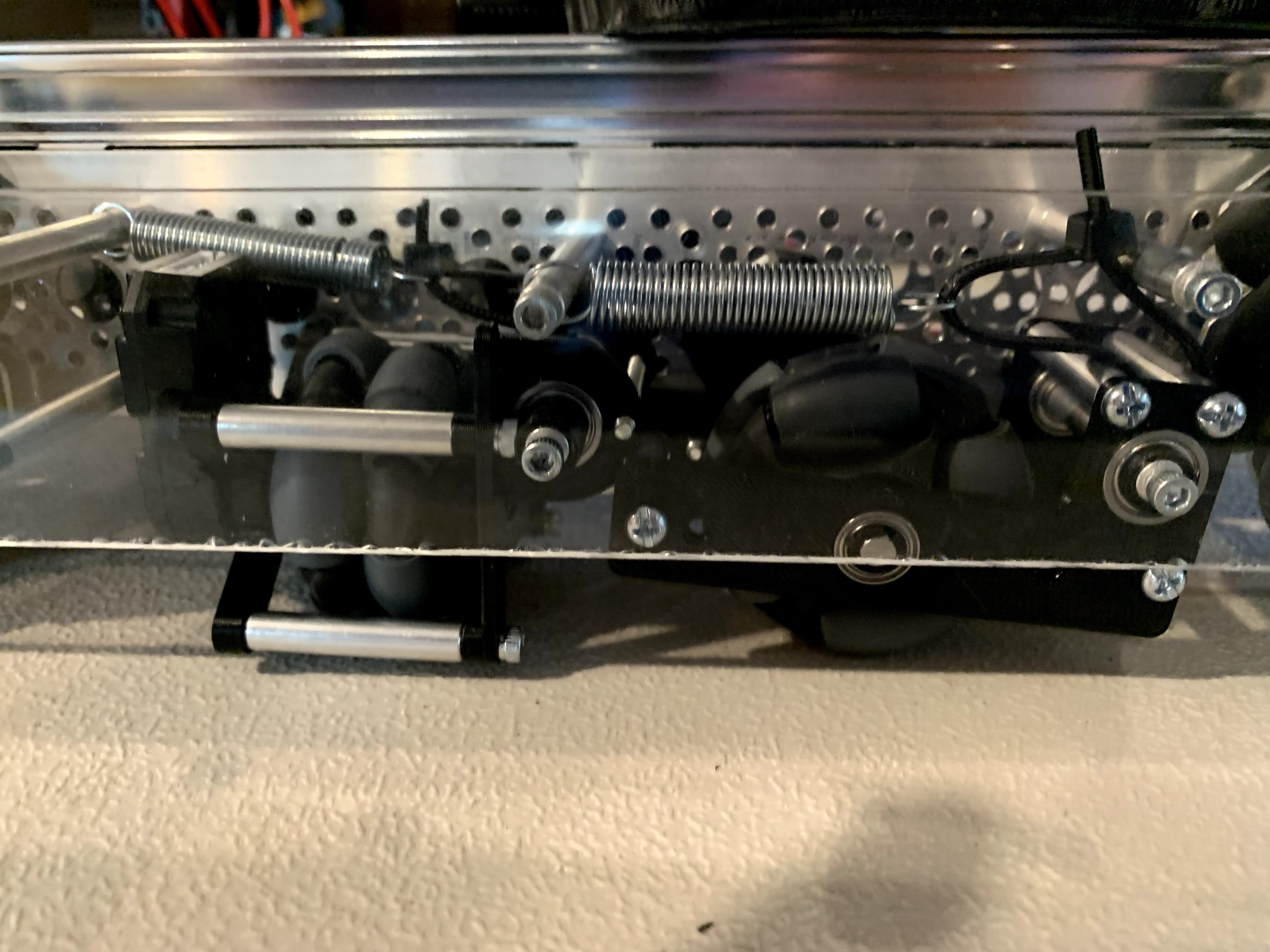
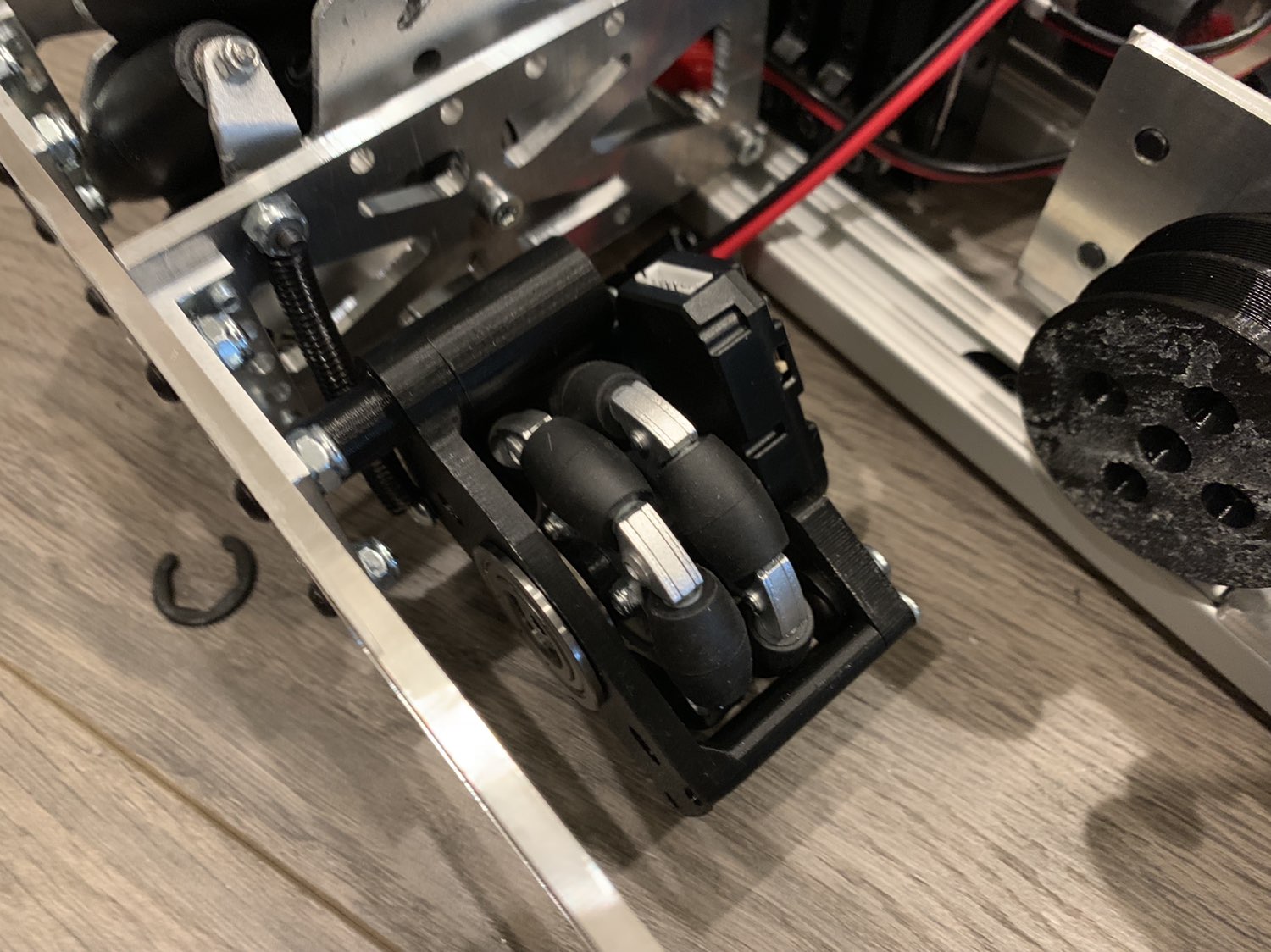
一个更小众的选择是垂直弹簧内置里程计轮。这个想法是,如果无动力全向轮相对于地面的高度发生变化,围绕枢轴弹出将导致无动力全向轮在平行于地面的轴上移动。垂直弹出的内置里程计轮不会遇到这样的问题。然而,这并不是大多数团队都会遇到的问题。垂直弹簧更难设计好,并且不建议在精度上相对较小的改进。

FTC 18172’s vertical springing#
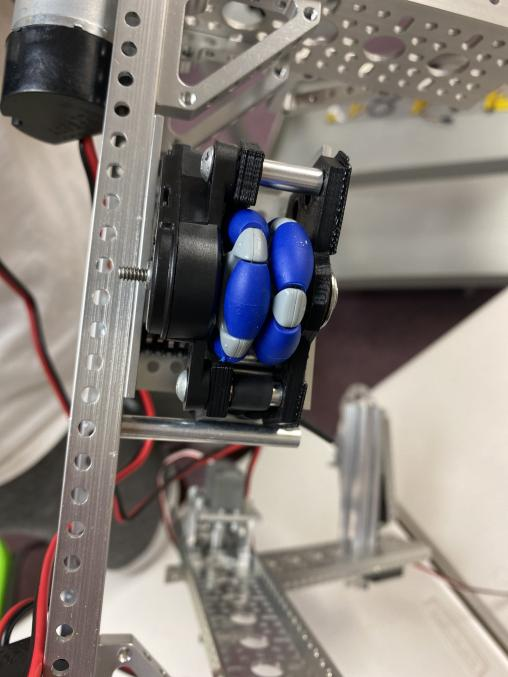
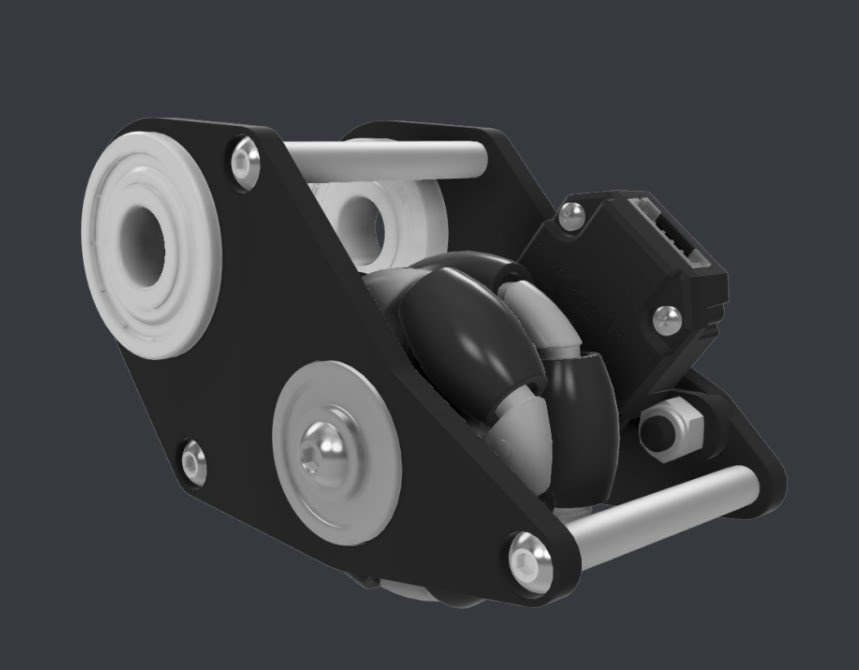
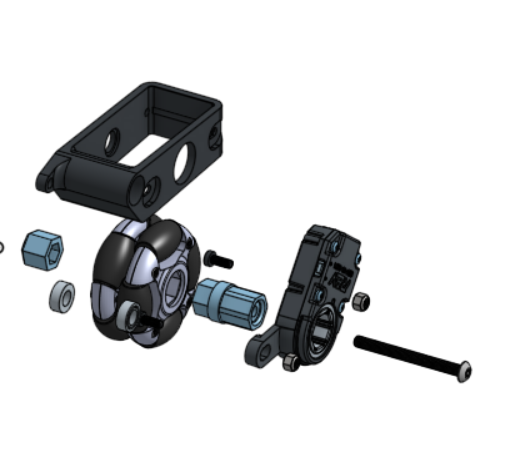
画廊#
开放式里程计(REV通孔编码器)#

FTC® Team 14310(REV 通孔编码器)#
FTC团队8802(REV通过孔编码器)#
FTC团队14320(US电子 S4T编码器)#

FTC团队11115(US电子 S4T编码器)#

FTC团队14481(REV通过孔编码器)#
FTC队3658(REV通过孔编码器)#
FTC队伍 3658 CAD#
FTC队7236(REV通过孔编码器)#
FTC 7236 CAD队伍#
