电机功率¶
与任何电气设备一样,电机也需要消耗一定的电流和功率才能运转。电机将部分输入功率转换为旋转轴的功率,这部分功率就是输出功率。从能量而非速度和扭矩的角度来考虑电机,可以让我们更容易计算如何使用电机,并为选择最佳应用齿轮比提供工具。
什么是电机功率?¶
从根本上说,功率是指在给定时间内传递的能量。实际上,这意味着功率就是你能从电机中获得多少 “能量”。电机的输出功率随负载的多少而变化,但不会随电机齿轮比的变化而变化。这意味着,自由旋转的 1:1 马达与自由旋转的 100:1 马达输出的功率相同(忽略摩擦差异),但实际速度和扭矩不同。输出功率与速度乘以扭矩成正比,因此在使用齿轮箱改变速度和扭矩时,输出功率必须保持不变。
另一个信息是电机的 输入 功率,虽然并不总是那么有用。电机的输入功率是指电机消耗功率的瓦数,等于发送到电机的电压乘以电机消耗的电流。电机的效率并非 100%,因此要获得一定的输出功率,通常需要输入功率的两倍甚至三倍。例如,一个标准的 FTC® 电机仅产生 29 瓦的输出功率就会消耗高达 65 瓦的功率。
峰值功率和电机曲线¶
为了弄清电机将消耗或输出多少功率,参考电机曲线很有帮助。这些数据表将电机的输出速度、输出扭矩、输出功率和效率都绘制在一张图表上。除 Core Hex 外,所有 FTC 合法电机都经过了动态测试,其数据如下。可以肯定的是,其他非限流电机(如舵机)也遵循类似的曲线,只是速度、扭矩和功率输出不同而已。
自由转速(每分钟) |
自由电流 (A) |
最大功率(瓦) |
堵转扭矩 (N*m) |
堵转电流 (A) |
|
|---|---|---|---|---|---|
goBILDA(MATRIX) |
5900 |
0.3 |
29 |
0.19 |
11 |
NeveRest |
5500 |
0.4 |
26 |
0.17 |
9.8 |
REV Core Hex[1] |
125 |
0.2 |
10 |
3.2 |
4.4 |
REV HD Hex |
6000 |
0.3 |
28 |
0.18 |
11 |
TorqueNado |
5900 |
0.2 |
26 |
0.17 |
9.8 |
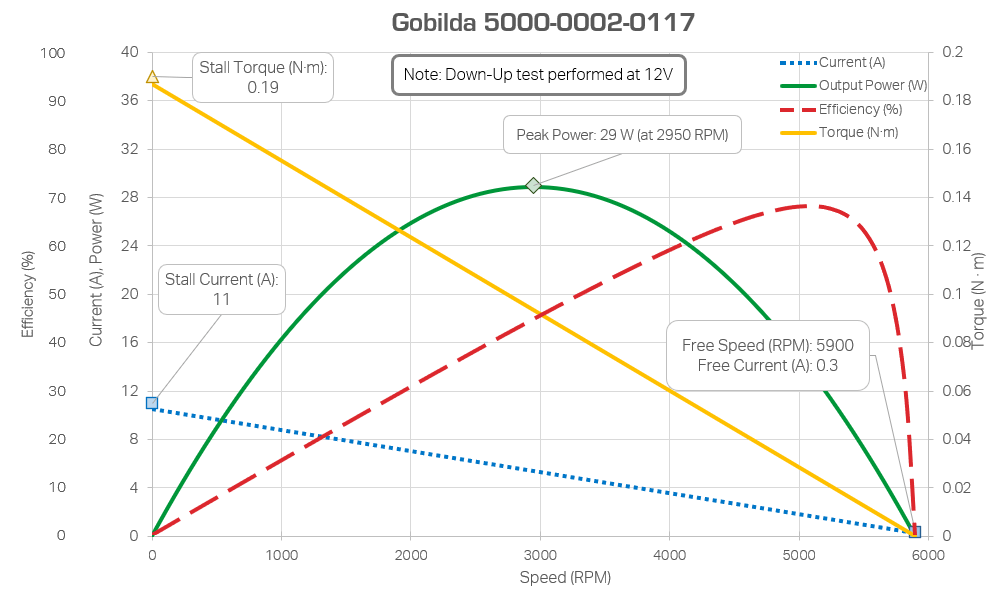
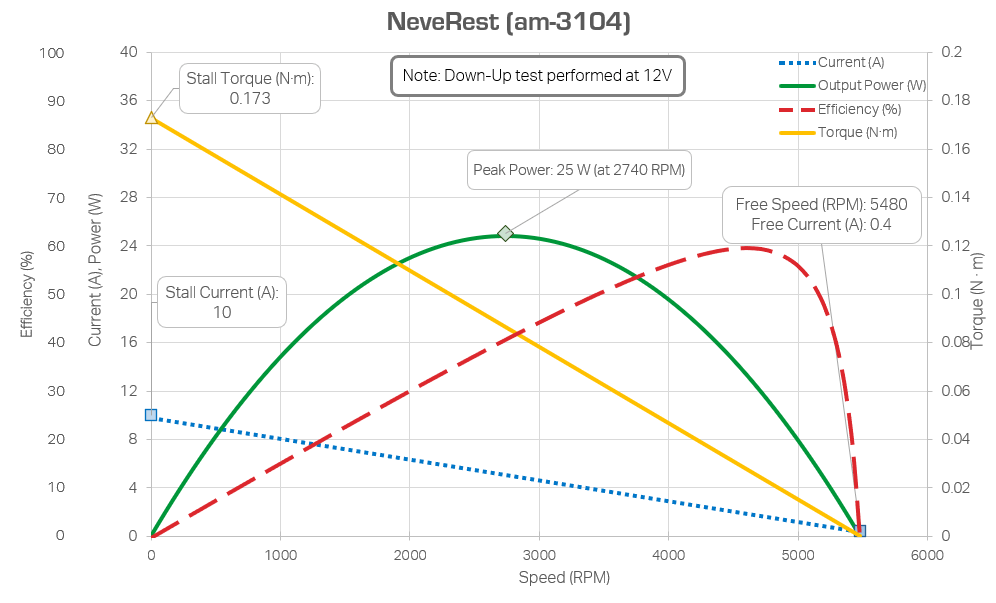


电机曲线表示电机在 12 V 电压下(相当于在软件中将电机功率设置为 1),轴承受不同程度的负载。如图所示,电机输出的功率并不是恒定的,而是一直上升到大约 50%的负载,然后再次下降。50% 负载时的这一点称为电机的 峰值功率输出 ,所有 FTC 合法电机的峰值功率输出点(50% 负载)都类似。
电机功率的变化意味着,当轴上的负载增加时,速度和扭矩输出并不是线性变化的。与直觉相反的是,给电机施加 50%的堵转负载并不会使其速度减半,反而会使其速度略高于 50%。同样,在电机上施加超过 50%的负载会导致速度下降得更快,而不是线性下降。
此外,您还可以看到效率随着转速的提高而提高。这意味着,如果电流消耗是一个问题,那么电机的负载应始终低于其堵转扭矩的 50%。电机的这两个特性,即峰值功率输出为堵转扭矩的 50%,以及电机的效率越低负载越高,指导选择电机的齿轮比。理想情况下,齿轮比的选择应使堵转扭矩是电机平均扭矩负荷的两倍,并应偏向于提供比所需更大的扭矩,而不是更小的扭矩。
电流消耗说明¶
在查看电机曲线时,您可能会发现 FTC 电机的堵转电流可高达每个电机 11 安培。在保险丝熔断之前,FTC 电池只能提供 20 安培的电流输出。不过,即使没有达到 20 安培的限制,过大的电流也会导致其他电机感觉迟钝或反应迟钝。应注意确保两个以上的电机不会同时堵转。
备注
在处理机械传动系统时,您或许可以忽略这一点,因为它们通常会在电机实际达到堵转电流之前打滑。但是,如果在牵引传动系统上使用极低的齿轮比或超过 4 个电机,就会超过 FTC 电池的电流限制。
电机可能会产生 “瞬时电流”,即在极短的时间内产生大量电流。这种情况通常发生在电机开始运转或瞬间加载负载时。虽然瞬时电流一般不会导致保险丝熔断,但会引起其他问题,例如,如果瞬时电流是由电机产生的,则会导致控制迟缓;如果瞬态电流是由舵机产生的,则会导致低电压(goBILDA 超高速舵机偶尔会出现这种情况)。