Electrónica del sistema de control#
Esta página contiene un desglose de los componentes electrónicos conocidos del sistema de control, así como cualquier nota relativa a los mismos
Componentes internos del Expansion Hub#
Advertencia
No desmonte un Centro de Control o Expansión a menos que realmente sepa lo que está haciendo. Se pueden dañar en el proceso, especialmente si uno no sabe cómo volver a montarlo correctamente. ¡ESTO ANULARÁ SU GARANTÍA!
Tablero Lynx#
«Lynx» es el nombre en clave de la placa dentro del Hub de Expansión y Hub de Control que interactúa con el hardware. Las referencias a «Lynx» que se hacen en el FTC® SDK se refieren a esta placa. Parece haber sido desarrollada tanto por REV como por DEKA, posiblemente para su uso en FIRST ® Global (a juzgar por la serigrafía de FIRST Global en la PCB).
Advertencia
No desmonte un Centro de Control o Expansión a menos que realmente sepa lo que está haciendo. Pueden resultar dañados en el proceso, especialmente si no se sabe cómo volver a montarlos correctamente.
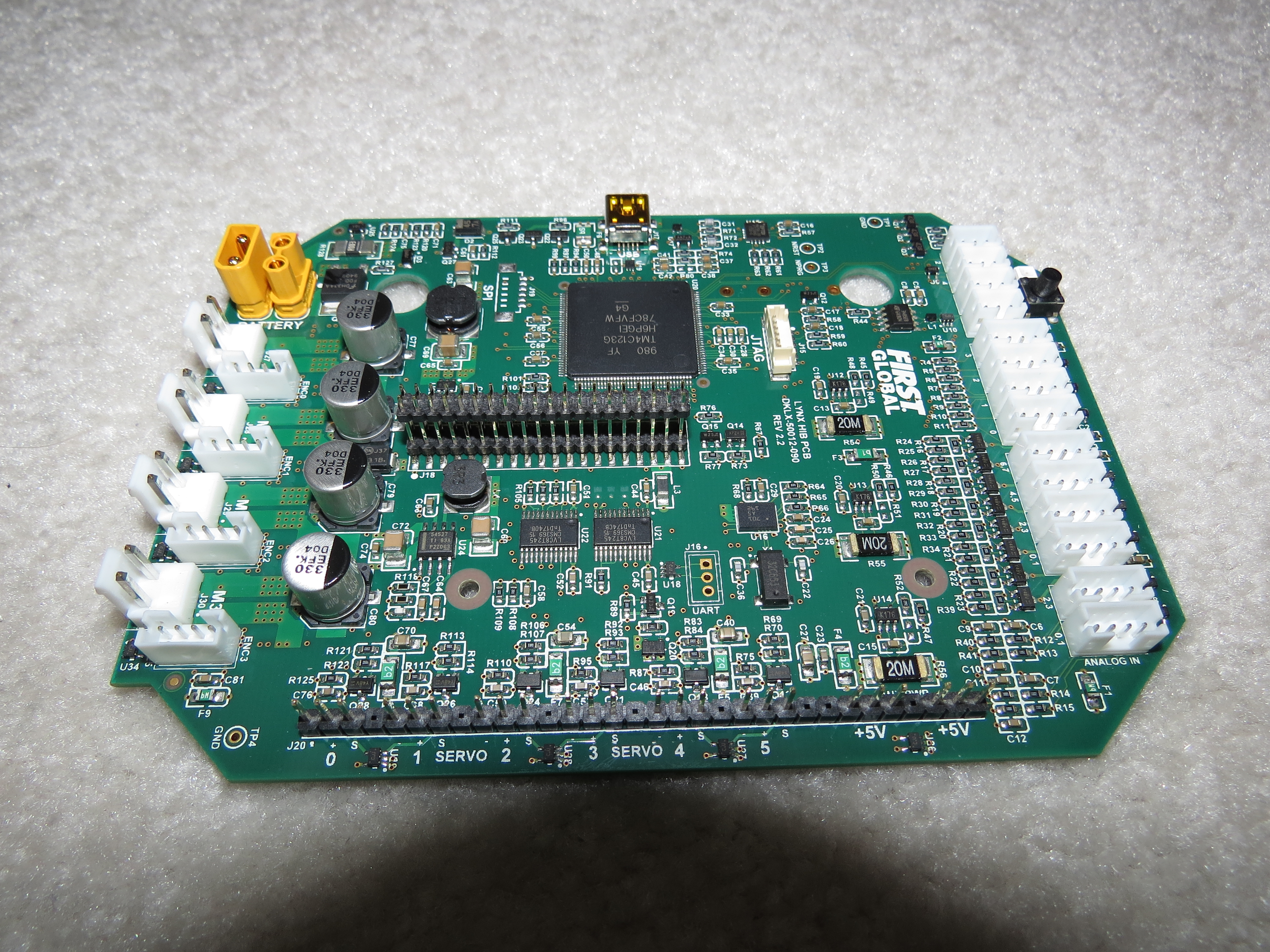
Una placa Lynx sacada de su caja#
Procesador#
El procesador principal del Expansion Hub es un ARM Cortex M4 de Texas Instruments que funciona a 80 MHZ.
Puertos#
El expansion hub dispone de los siguientes puertos
Dos puertos de depuración UART
El puerto superior emite un flujo continuo de datos CSV de alta velocidad procedentes de los distintos subsistemas del hub.
El puerto inferior emite datos a una velocidad en baudios de 115200 con una verbosidad especificada por el usuario.
Cuatro puertos I2C
Estos puertos son compatibles con 100/400 kHz y están conectados a un bus independiente, por lo que no hay que preocuparse por las colisiones de direcciones.
Hay resistencias de pull up integradas en este puerto.
Ocho puertos DIO
Sólo 3,3 V, corriente limitada, puede suministrar brevemente más corriente que la especificada. Tirado hacia arriba internamente.
Cuatro puertos analógicos
5V, puedes utilizar un variador de nivel para suministrar 5v al sensor, pero ten cuidado de que la línea analógica no pase por el variador de nivel. Sin embargo, las líneas VIN y GND deben pasar por el conmutador de nivel para que funcione.
Seis servopuertos
El suministro de 5V en los puertos de servo está apagado por defecto, y sólo se activará una vez que se utilice un servo. Los seis pines de 5V se activan y desactivan juntos, y desactivar PWM en un puerto desactivará todos los puertos a menos que se utilice otro servo.
Dos puertos de alimentación de 5 V
La alimentación de 5V se comparte con los servos
Cuatro puertos de motor
Corriente limitada y protección contra sobretemperatura en el chip. La salida no frena el puente h durante el ciclo de apagado del PWM. Lo que esto significa es que podría haber problemas de linealidad durante la desaceleración, debido al impulso en el motor.
El controlador del motor es un ST Microelectronics VNH5050 motor driver IC, que es capaz de manejar muy por encima de la cantidad máxima de corriente de un motor FTC puede dibujar. Tiene un sensor de corriente integrado y se ha utilizado desde la era de la robótica moderna. Incorpora límites de seguridad térmicos y de corriente. Este controlador de motor se ha utilizado durante años, e incluso puede remontarse a los primeros sistemas de control basados en HiTechnic.
Cuatro puertos de codificador
IMPORTANTE: Sólo dos de los puertos de encoder (Puertos 0 y 3) parecen estar conectados vía hardware y son fiables a alta velocidad. Hay dos métodos de conectar un codificador internamente al microprocesador de texas instruments, a través de hardware y software. Los puertos de hardware utilizan el chip decodificador de cuadratura integrado y son extremadamente precisos a alta velocidad, mientras que los codificadores decodificados en software no son fiables a altas velocidades. Como resultado, los codificadores de alto recuento por revolución (CPR), aquellos con más de 4000 recuentos por revolución, NO deben utilizarse en los puertos 1 y 2, los puertos conectados en software.
Dos conectores XT30
Hay que tener cuidado al mover los cables, ya que se sabe que estos conectores fallan y se desprenden de la placa.
Además, los XT30 se desgastan y se aflojan con el tiempo. Se recomienda utilizar pegamento caliente si los cables se aflojan.
Conector mini USB B
Capacidad de USB 2.0 a toda velocidad y salida de 5 V para cargar un teléfono. La salida de 5 V puede ser poco fiable, depende del hub.
Conector interno
Este conector es el que se utiliza para conectar a la placa-hija android. Presumiblemente tiene capacidad UART así como alimentación y poder. Todos los hubs de expansión tienen este conector, sean o no un hub de control. Presumiblemente esto se debe a que el hub de control y el hub REV se desarrollaron juntos al mismo tiempo.
Control Hub#
El Control Hub es un Expansion Hub con una placa hija-Android integrada conectada a él. Esto le permite no necesitar un teléfono Controlador de Robot separado, ya que la placa hija funciona como el Controlador de Robot. Internamente, LynxCommands se envían desde la placa hija a la placa Lynx a través de una conexión UART interna.
La placa-hija del concentrador de control contiene un RK3328 Quad-core ARM Cortex-A53 que ejecuta una versión personalizada de Android/Linux. Este software es de código abierto, pero no tiene nada destacable, salvo algún software que gestiona el punto de acceso wifi. No tiene disipación térmica, como disipadores de calor, en el chip, lo que puede causar estrangulamiento térmico cuando se utilizan aplicaciones pesadas como tensorflow.
Advertencia
No desmonte un Centro de Control o Expansión a menos que realmente sepa lo que está haciendo. Pueden resultar dañados en el proceso, especialmente si no se sabe cómo volver a montarlos correctamente.
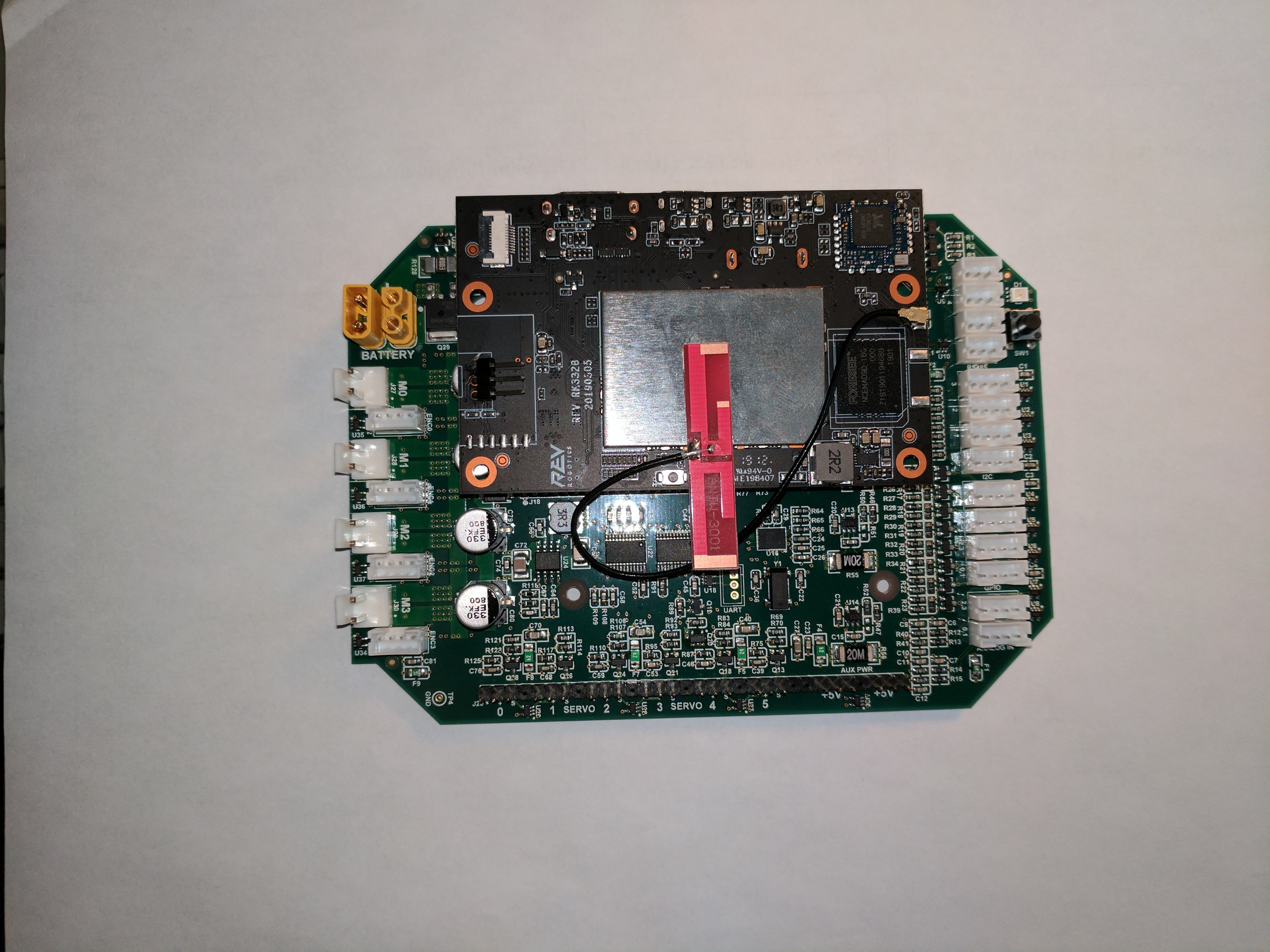
El ordenador monoplaca y la placa Lynx de un Control Hub#
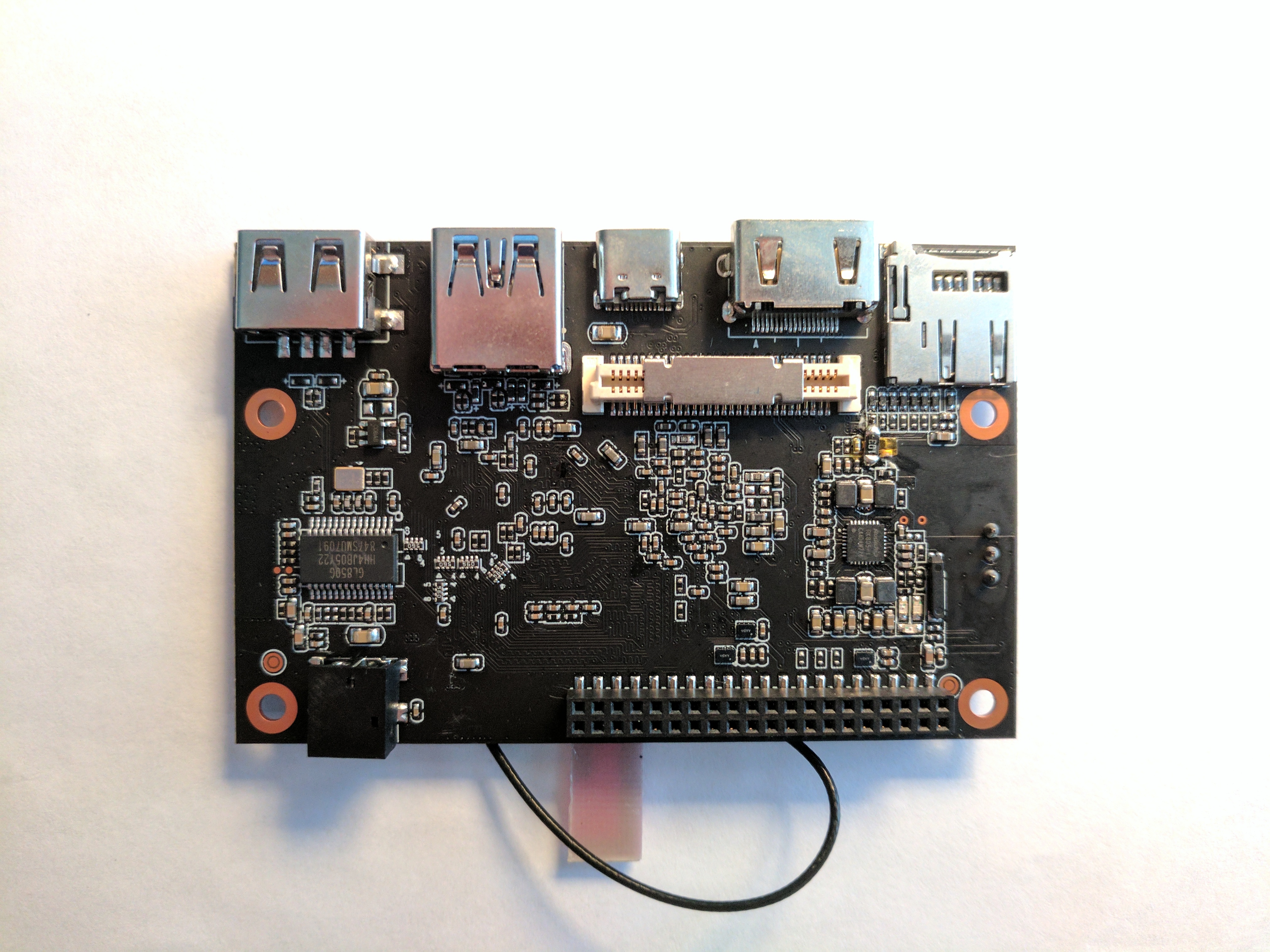
La placa android, desmontada de un control hub#