Ruedas muertas#
Advertencia
Este es un aspecto muy nicho del diseño en FTC ®. Generalmente es algo que hacen los equipos más experimentados, que han tenido tiempo de probar repetidamente sus diseños y mecanismos con software durante el off-season.
Los términos ruedas muertas, ruedas de seguimiento, cápsulas de odometría y odometría se confunden a menudo en la comunidad de FTC. Sin embargo, hay algunas diferencias clave que hay que tener en cuenta. La odometría es un término genérico que se refiere al uso general de sensores de movimiento con fines de localización. Mientras tanto, ruedas muertas, ruedas de seguimiento y cápsulas de odometría son términos sinónimos.
Términos
- Rueda muerta#
Una pequeña rueda sin motor (normalmente una rueda omni) que realiza un seguimiento de la distancia que ha recorrido el robot a través del codificador acoplado al eje de la rueda.
Normalmente, habrá dos o tres ruedas: una o dos en los ejes x e y para seguir la posición delante-detrás y a la izquierda-derecha en relación con el punto de partida. Por lo general, las ruedas de odometría tienen muelles para que la rueda esté en contacto con las baldosas del suelo en todo momento para garantizar la precisión.
La odometría se refiere al uso de sensores de movimiento para la localización. La localización es un medio para poder localizar la posición del robot en un momento dado. La localización es crucial en el seguimiento de trayectorias y en los modos autónomos avanzados, ya que uno necesita saber dónde se encuentra para generar los movimientos necesarios para alcanzar el destino deseado. El software de localización desempeña un papel fundamental en la odometría; sin embargo, para producir resultados precisos, es necesario un diseño de hardware fiable y preciso.
La forma más sencilla de odometría es la localización por codificador de accionamiento. Se trata del uso de codificadores que miden la rotación de los motores que accionan el chasis. Se leen los datos del codificador y se introducen en la ecuación cinemática del chasis específico para obtener la velocidad del cuerpo. Por lo general, la localización del codificador de accionamiento es bastante sencilla y fácil de configurar, ya que casi todos los motores legales FTC tienen codificadores incorporados. Conseguir la localización del codificador de accionamiento es simplemente una cuestión de conectar los cables, sin necesidad de hardware adicional.
Muchos equipos de la comunidad han convergido en una solución única que no se ve mucho fuera de FTC: el uso de «ruedas muertas», «ruedas de seguimiento» o «cápsulas de odometría» (todos estos términos son sinónimos). Se trata de pequeñas ruedas «muertas» o no propulsadas (no accionadas por un motor) unidas a un sensor codificador. A menudo, dos o tres ruedas muertas se apoyan en el suelo para garantizar un seguimiento preciso. El diseño de dos ruedas utiliza una cápsula paralela y otra perpendicular (paralela y perpendicular con respecto al eje de la rueda del chasis), que miden el movimiento x e y respectivamente. El cambio de rumbo se mide mediante un giroscopio. El diseño de tres ruedas utiliza dos cápsulas paralelas y una perpendicular, que miden el movimiento x e y respectivamente. Sin embargo, este diseño renuncia al giroscopio y en su lugar mide el rumbo a través de la diferencia con las dos ruedas paralelas. Esto es a menudo más preciso en el contexto del sistema de control FTC porque el BNO055 IMU (utilizado para el giroscopio en el diseño de dos ruedas) utiliza I2C que es más lento que el resto de la E / S en el Hub REV y no se puede leer a granel. Estos dos problemas conducen a problemas de desvío de minutos que pueden agravarse con el tiempo, lo que lleva a un sistema de localización más inexacta cuando se utiliza el diseño de dos ruedas.
Sin embargo, diseñar ruedas muertas de precisión constante resulta un reto de diseño difícil. Además, suele ser bastante caro. Un juego de tres ruedas muertas costará como mínimo 100 dólares sólo por los codificadores, antes de cualquier hardware.
Veamos las ventajas e inconvenientes de cada sistema.
Localización del codificador de accionamiento#
Pros:
Barato (lo más probable es que los motores que utilices ya incorporen codificadores (encoders)).
Accesible
Se necesita muy poca configuración
Cons:
La localización del codificador del accionamiento mecanum puede ser bastante imprecisa debido a la falta de tracción de las ruedas mecanum.
Se desviará en aceleraciones altas con accionamiento mecánico. La precisión será suficiente para los modos autónomos básicos si se limita la aceleración.
Cápsulas de odometría de dos ruedas#
Pros:
Más barato que el diseño de 3 ruedas
Bastante buena precisión
No es necesario ajustar el rumbo
Cons:
Sujeto a más desvío que el diseño de 3 ruedas
Cápsulas de odometría de tres ruedas#
Pros:
Seguimiento relativamente preciso. Gran precisión en un modo autónomo de 30 segundos.
Cons:
Bastante caro
Es muy importante afinar el rumbo
Codificadores (Encoders)#
Gran parte de la localización realizada en software se basa en las lecturas de los encóderes. encóderes son sensores que realizan un seguimiento de los «recuentos» o «ticks», que son valores que representan una cierta cantidad de una rotación. Diferentes codificadores pueden tener un número diferente de cuentas por revolución (CPR), que a veces también se llama ticks por revolución. Cuanto mayor sea el número de cuentas, más precisos serán los datos.
Los codificadores se conectan a los puertos JST-PH de los REV hubs. Estos codificadores pueden ser incorporados a los motores o externos. Los encoders externos aún necesitarán ser conectados a un puerto de encoder pero no están relacionados con el motor en ese puerto. A través del software, podemos utilizar el objeto motor para determinar la posición del encoder. Esto debe hacerse con motores que no utilicen encoders. Si estás usando ruedas muertas, no necesitarás los puertos de encoder del motor de accionamiento, así que esos son puertos potenciales que podrías querer usar.
Si se opta por diseñar ruedas muertas, sólo hay dos codificadores recomendados para FTC: REV Through-Bore Encoders y U.S. Digital S4T Encoders.
REV Through-Bore#
A menudo abreviado como «REVcoders» o «revcoders», el REV Through-Bore encoders se ha convertido rápidamente en la opción de facto de la comunidad FTC. Los codificadores REV se han ganado tal reputación debido a su relativa asequibilidad, su fiabilidad muy mejorada y su facilidad de uso. El diseño pasante ha demostrado ser una mejora significativa con respecto a los diseños anteriores de codificadores de disco óptico. Los codificadores de disco óptico son muy frágiles, propensos a rayarse y mucho menos tolerantes a los fallos de diseño.

REV Through-Bore Encoder#
Ventajas:
El diseño through-bore es muy robusto y fácil de diseñar
Relativamente barato
Alto CPR
Cableado sencillo
Desventajas:
Bastante grande en comparación con otros codificadores. Puede ser difícil crear un diseño compacto
Muchos through-bore parecen experimentar una resistencia ligera y desigual al girar. REV dice que esto es normal y disminuirá a medida que se desgaste el codificador.
Para forzar el desgaste de un codificador REV Through-Bore, se puede hacer girar un eje hexagonal de 1/2» en un taladro a través del codificador durante un par de minutos.
Puntos de montaje extraños
Nota
Los codificadores pasantes tienen una RCP muy alto (8k). El Hub REV transmite la velocidad en un entero con signo de 16 bits. Esto significa que sólo puede comunicar un valor máximo de 2^15 (que es 32768). Por lo tanto, sólo se necesitan 4 rotaciones por segundo (32k / 8k = 4) para que el valor de la velocidad en el REV Hub experimente un desbordamiento de enteros. Esto es principalmente una preocupación cuando se trata de perfiles de movimiento. Las herramientas populares existentes (Road Runner y FTCLib) tienen mecanismos para tratar este problema así que esto no es una preocupación y no debe influir en su decisión de diseño. Sólo ten en cuenta este detalle cuando empieces a programar.
U.S. Digital S4T#
El encóder de eje en miniatura S4T es otra opción viable utilizada en diseños de rueda muerta. Estos encóderes son muy pequeños y pueden reducir significativamente la huella de su diseño de rueda muerta. El engranaje de estos encóderes es ideal para evitar cargas de choque.

Codificador S4T#
Ventajas:
Muy compacto
Desventajas:
Más caro (casi el doble de precio)
Menos duradero
Cables muy finos. Propensos a romperse fácilmente si no se sujetan correctamente.
Idealmente requiere un engranaje externo
Codificador SRX Mag#
El SRX Mag Encoder de Cross The Road Electronics es un codificador magnético. No es utilizado por muchos equipos de FTC debido a su complejidad ligeramente mayor de usar y la falta de documentación centrada en FTC. Es más popular en FRC ®.

Codificador magnético CTRE SRX#
Ventajas:
Muy compacto
Relativamente barato
Desventajas:
Requiere montaje
No existe mucha información para utilizar en FTC
U.S. Digital E8T (obsoleto)#
Los codificadores ópticos E8T, que en su día fueron la opción de facto para la mayoría de los equipos FTC, ya no se recomiendan, ya que los REV Through-Bore son una opción superior a un precio equivalente. El diseño de disco óptico de orificio abierto de estos codificadores se enfrenta a una serie de frustrantes defectos de diseño que los hacen muy frágiles y propensos a romperse. La única ventaja que tienen con respecto a los REV Through-Bore es que ocupan menos espacio.

Codificador E8T#
Diseño#
Existen pocos diseños de ruedas muertas de código abierto. Las ruedas muertas suelen diseñarse en torno al propio chasis del equipo y los equipos de FTC rara vez publican los CAD de sus robots.
He aquí algunos diseños de ruedas muertas disponibles públicamente:
Odometría Abierta por 18219
Utiliza el REV Through-Bore Encoder
El diseño más popular y robusto disponible públicamente
Suficientemente compacto para caber en un canal goBILDA
Cosas a tener en cuenta:
Utiliza ruedas Rotacaster de 35 mm de Australia. El envío puede tardar un poco
goREVdometry
Utiliza el REV Through-Bore Encoder
Suficientemente compacto para caber en un canal goBILDA
Cosas a tener en cuenta:
Información disponible únicamente a través de su canal de Discord
No se ha iterado en un tiempo
11115 Diseño Gluten Free - 2019
https://drive.google.com/file/d/16ZQRSiWdzTKSH92VpKrxKpXy3TTh0sA5/view?usp=sharing
El enlace de arriba todo el montaje del robot para el CAD de 11115 para la temporada 2018-19
Cosas a tener en cuenta:
Utiliza engranajes LEGO ®
Utiliza US Digital S4T. Bastante caros
9794 Wizards.exe Design
Suficientemente compacto para caber en un canal goBILDA
**Ya no se recomienda porque utiliza el E8T.
Tensado de resortes#
Es altamente recomendable que el diseño de su rueda muerta incluya algún tipo de resorte tensor que empuje la rueda hacia el suelo. Esto garantiza que la rueda esté siempre en contacto con el suelo y tenga la tracción adecuada. Se requiere una fuerza suficiente para garantizar una tracción constante y evitar que las ruedas patinen. Tenga en cuenta que demasiada fuerza puede levantar del suelo un chasis ligero e interrumpir la conducción.
El método más popular para tensar los resortes consiste en hacer pivotar la cápsula alrededor de un punto y aplicar una fuerza de rotación mediante un resorte o una goma elástica.
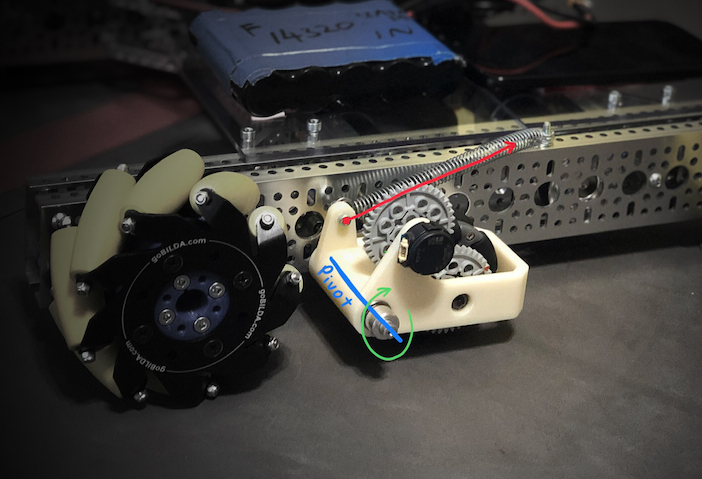
Tensado de resorte del equipo de FTC 14320#
Una opción mucho más especializada consiste en mecer verticalmente las cápsulas de odometría. La idea es que la suspensión alrededor de un pivote hará que las ruedas muertas se muevan en el eje paralelo al suelo si cambia la altura de las ruedas muertas con respecto al suelo. Las cápsulas de odometría con resortes verticales no experimentarán este problema. Sin embargo, esto no es realmente un problema que la mayoría de los equipos experimentarán. La suspensión vertical es mucho más difícil de diseñar bien y no se recomienda por la mejora relativamente pequeña de la precisión que proporciona.

El resorte vertical del equipo de FTC 18172#
Galería#
Odometría abierta (REV Through Bore Encoder)#


FTC® Equipo 14310 (REV Through Bore Encoder)#

Equipo de FTC 8802 (REV Through Bore Encoder)#

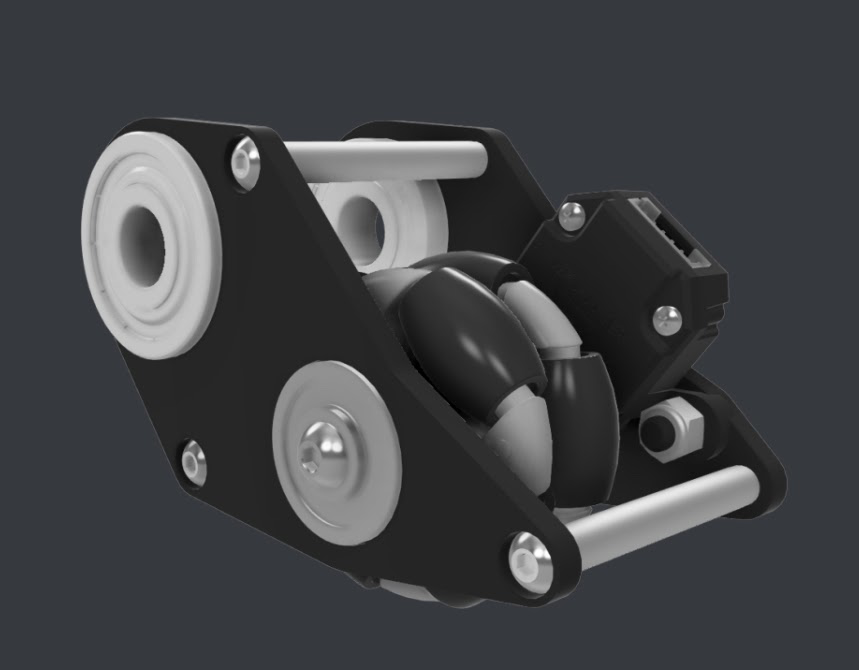
Equipo de FTC 14320 (US Digital S4T)#

Equipo de FTC 11115 (US Digital S4T)#

`Álbum de fotos del equipo 11115<https://photos.google.com/share/AF1QipPx5inCdVxK6wAqtIznFE-KqvnuzgRq9rFxrhzI50r0DeYYo2o11hWB4hroYObm8A?key=UWwxd3hFdXpYaHFqaFhTSFJnWFlEWjgtV1FTN3Zn>`_#
Equipo de FTC 14481 (REV Through Bore Encoder)#

Equipo de FTC 3658 (REV Through Bore Encoder)#
Equipo de FTC 3658 CAD#
Equipo de FTC 7236 (REV Through Bore Encoder)#

Equipo de FTC 7236 CAD#
