Tanques (Skid-Steer) Chasis¶
2 ruedas motrices (Pushbot Drive)¶
Recomendado sólo para el primer chasis, no para competiciones
Este chasis para novatos se considera una de los chasises inferiores, aunque es utilizable en niveles de competición bajos. Es el tipo de chasis introductorio para muchos novatos, ya que se promociona en las guías oficiales publicadas por FIRST ® (dándole el nombre de pushbot). Suele tener transmisión directa ruedas de tracción con ruedas omni sin motor.
Este tipo de chasis tiene un giro deficiente, ya que el centro de giro se encuentra en la parte trasera del robot, entre las dos ruedas motrices. En comparación con otras chasises, tiene una aceleración deficiente debido a que sólo utiliza dos motores.
Aunque no sea un chasis óptimo, es posible ser competitivo siempre que el chasis sea fiable. En general, aconsejamos a todos los equipos nuevos que construyan el pushbot principalmente para aprender a construir con un kit. El pushbot es un buen punto de partida y ayuda al equipo a familiarizarse con el uso de las piezas del kit, la fijación de las ruedas, el montaje de los motores, etc. Sin embargo, es inferior a cualquier otr ochasis en un contexto competitivo.
Atención
Aunque el pushbot es un buen primer chasis para que los nuevos equipos se familiaricen con el kit, se recomienda que los equipos se alejen de este chasis cuando construyan su robot de competición.
Ventajas¶
El chasis más sencillo de construir
No hay que preocuparse por la potencia de las cuatro ruedas
Desventajas¶
Más lento que otras opciones
Poca potencia (el resto de opciones de chasis suelen utilizar 4 motores).
Utiliza el motor Tetrix MAX, que tiende a quemarse con facilidad, es poco potente y tiene una caja de engranajes frágil.
Carece de agilidad y maniobrabilidad debido al giro de 2 motores
Poca aceleración debido a los 2 motores
A menudo el :term:`accionamiento directo`<Direct Drive>, muy desaconsejado para los chasises

Ejemplo de chasis pushbot incluida en la guía de arranque FTC ®.¶
Tracción a las 4 ruedas¶
En su forma más común, el chasis utiliza la misma disposición de ruedas que el chasis de dos ruedas (2 ruedas de tracción detrás, 2 omnis delante), pero con una diferencia notable: Las cuatro ruedas son motrices.
Algunos equipos pondrán las cuatro ruedas de tracción o utilizarán las 4 ruedas omni. No se recomienda utilizar las cuatro ruedas de tracción debido a los malos giros que se producen con esta configuración. Esto se debe a la fricción de las ruedas. El uso de ruedas omni para las cuatro ruedas dará como resultado un giro increíble, con el robot girando alrededor de su centro.
Término
- Rozamiento de ruedas¶
El rozamiento de la rueda se refiere a la fricción entre el lateral de la rueda y la baldosa del suelo. Inhibe el giro, ya que el chasis debe superar esta fuerza de fricción para hacer girar al robot. El rozamiento de las ruedas es más común en transmisiones de 4 ó 6 ruedas que no tienen una caída central.
Sin embargo, esta ventaja conlleva una importante pérdida de tracción. Por estas razones, muchos equipos optan por usar dos ruedas de tracción y dos ruedas omni para conseguir un equilibrio entre giro rápido y tracción. La principal ventaja de esta cadena cinemática sobre otras cadenas cinemáticas de tanques es su capacidad para desplazarse fácilmente por terrenos elevados cuando el centro del robot se eleva por encima del terreno.
Se sugiere que un chasis con cuatro ruedas sea cercana, o exactamente, a un cuadrado. De lo contrario, pueden surgir problemas de giro.
Nota
La distribución del peso es además un factor importante que debe tenerse en cuenta: cuanto más peso en la espalda, mejor.
Término
- Distribución del peso¶
La distribución del peso se refiere generalmente a cómo está proporcionado el peso del robot. Es deseable que sea relativamente 50-50 (50% del peso en la mitad delantera, 50% en la mitad trasera) para que el chasis tenga una maniobrabilidad y un giro óptimo.
El giro descentrado, que puede o no ser un inconveniente, es casi omnipresente entre los 4x4. Esto puede no ser un problema para los equipos, pero es bueno ser consciente de ello. El giro descentrado puede ser una ventaja, pero hay que tener en cuenta que los giros serán ligeramente más lentos en las 4 ruedas motrices que en sus contrapartes de seis u ocho ruedas.
Ventajas¶
Más maniobrable que 2WD
Aceleración y tracción sólidas
Puede atravesar terrenos si el chasis se eleva lo suficiente
Buena potencia de empuje para la defensa, pero lo suficientemente maniobrable para evitarla
Desventajas¶
Puede volcar más fácilmente que 6WD/8WD con un centro de masa alto
Todas las ruedas de tracción 4WD pueden tener una maniobrabilidad disminuida
La distribución del peso influye en el punto y radio de giro del robot
Ejemplos CAD de tracción a las cuatro ruedas (Haga clic para ampliar)
7209 Tech Hogs, Relic Recovery¶

10641 Atomic Gears, Rover Ruckus¶
Tracción a las 6 ruedas (6WD)¶
Un chasis de 6 ruedas es un chasis competitivo común en FTC por múltiples razones: tiene una tracción fantástica, un gran giro, y al tener 6 ruedas, el chasis tiene más contacto con el suelo, ayudando con la estabilidad y la tracción. Hay dos tipos principales de transmisiones de 6 ruedas: las que tienen esquinas omnis y las que tienen centro de caída.
Término
- Centro de Caída¶
Un centro de caída 6WD son 6 ruedas motrices con la rueda central montada ligeramente por debajo de las otras dos ruedas. La caída debe ser en cualquier lugar de más de 1/16 «hasta 1/4». Sin embargo, la caída recomendada es de alrededor de 1/8». Normalmente, los robots más ligeros (<25 lbs.) pueden tener menos caída, mientras que los robots más pesados (>25 lbs.) funcionan ligeramente mejor con más de 1/8» de caída.
El objetivo de dejar caer la rueda central es garantizar que sólo 4 ruedas estén en contacto con el suelo en todo momento. Esto se debe a que girar con 6 ruedas en el suelo introduce mucha fricción, lo que hace muy difícil girar rápidamente. Tenga en cuenta que el descenso requerido puede variar en función de las condiciones del terreno y del peso del robot.
El giro puede degradarse drásticamente debido a una diferencia de material debajo del campo, lo que hace que el robot se hunda más de lo habitual.
La mayoría de las transmisiones de 6 ruedas con centro de caída se hacen usando chasises personalizados porque es difícil conseguir la caída de la rueda central usando un sistema de construcción basado en un kit (una notable excepción son los chasises de kit basados en REV). Es posible realizar una caída central con goBILDA y Actobotics utilizando bloques de almohada, pero es un poco más incómodo. Sin embargo, con el nuevo goBILDA drop-center bearing plate, es sencillo hacer un chasis con centro de caída en el canal goBILDA.
Las transmisiones de 6 ruedas con ruedas omni de esquina no necesitan tener una caída central. Intenta resolver el problema de los giros sustituyendo las ruedas de tracción de las esquinas por ruedas omni, lo que permite al chasis lograr mejores giros, aunque con algo menos de tracción que con una caída central. Esto es muy fácil de construir en kits, y es un gran chasis de todo-en torno. Las ruedas omnidireccionales centrales y las omnidireccionales de esquina pueden combinarse para obtener la máxima fiabilidad de giro, aunque esto conlleva efectos secundarios como balanceo y tracción reducida.
Ventajas¶
Gran tracción y maniobrabilidad
Buena aceleración, puede tener una alta velocidad máxima
Gran estabilidad con todos los pesos de robot
Capaz de jugar en defensa
Desventajas¶
La 6WD de caída central son difícil de construir con los sistemas basados en canal, aunque esto se ha mitigado parcialmente con la placa de rodamiento de centro descendente goBILDA
La tracción 6WD es ligeramente peor en los giros, pero tiene más tracción.
La 6WD de centro de caída depende de las condiciones del campo
Esquina omni 6WD tiene menos tracción
Las relaciones de engranajes <Gear Reduction> lentas harán que un 6WD se sienta lento.
Ejemplos CAD de tracción a las seis ruedas (Haga clic para ampliar)

7236 Recharged Green, Rover Ruckus; caída central 6WD¶

Ethan Doak, goBILDA 6 ruedas motrices con ruedas omni de esquina¶
Tracción a las 8 ruedas¶
Una transmisión de 8 ruedas es menos común que su contraparte de 6 ruedas motrices, ya que combina elementos que se encuentran tanto en los chasises de 4 ruedas como en las de 6 ruedas. Por ejemplo, el chasis de 6 ruedas suele tener una rueda central más baja para que el robot gire sobre cuatro ruedas en lugar de seis, lo que reduce la fricción y aumenta la movilidad de giro.
En unas 8 ruedas motrices, las cuatro ruedas centrales están caídas. Esto significa que, al girar, sólo estas cuatro ruedas centrales tocan el suelo. Así, la transmisión de 8 ruedas tiene algo más de estabilidad al girar que una de 6, mientras que las de 6 pueden girar más rápidamente. Además, como la tracción a 8 ruedas tiene las ruedas en el mismo lugar que una tracción a 4 ruedas, tiene la estabilidad de una tracción a 4 ruedas.
Se sugiere accionar las ocho ruedas y utilizar motores planetarios en lugar de un motor engranajes rectos.
Los equipos también tienen la opción de utilizar ruedas omni dobles en las cuatro ruedas exteriores. De este modo se reduce la fuerza de tracción/empuje y se aumenta la movilidad.
Ventajas¶
Combina la estabilidad de la 6WD con la agilidad de la 4WD
Aún más estable que 6WD
Tracción y aceleración fantásticas
Excelente para la defensa
Desventajas¶
Ocupa más espacio que la 6WD
Accionar las 8 ruedas puede ser complicado
Sin una caída central adecuada, los giros pueden verse drásticamente reducidos

3846 Maelstrom, Rover Ruckus¶


13075 Coram Deo Academy Robotics, Rover Ruckus¶
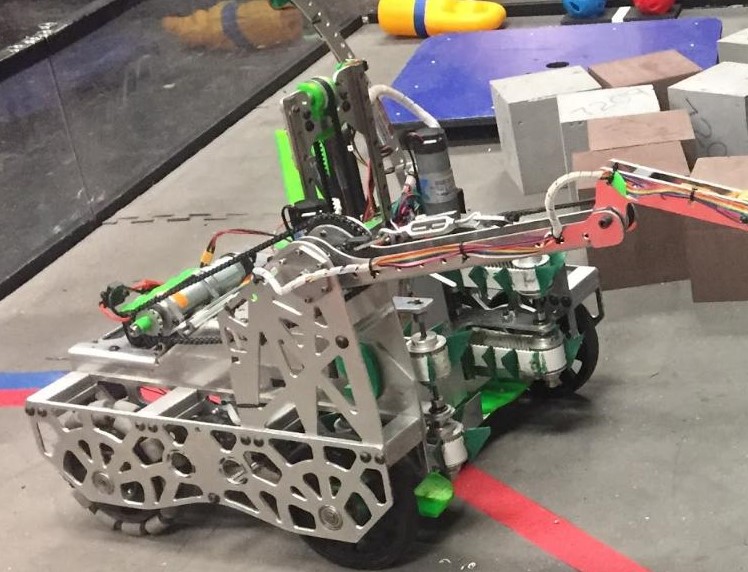
Accionamiento de la banda de rodadura¶
La tracción por bandas de rodadura es el uso de bandas de rodadura o correas anchas para impulsar el movimiento, como en un tanque de la vida real. Por desgracia, en la FTC no es una transmisión competitiva por varias razones.
Las bandas de rodadura son complejas y tienen muchos puntos de fallo. Las bandas de rodadura también son muy propensas a defenderse, y basta un ligero golpe de otro robot para desalinearlas. Commercial Off-The-Shelf (COTS) las opciones de bandas de rodadura tampoco son buenas: las orugas TETRIX tienen tendencia a romperse y descarrilar cuando se utilizan en los chasises de los robots, por lo que no son adecuadas para su uso en competición.
Aunque es posible implantar con éxito la tracción en las bandas de rodadura, como en el ejemplo siguiente, la mayoría de los equipos inexpertos no tienen la capacidad ni los conocimientos necesarios para hacerlo. La tracción de la banda de rodadura ofrece mejoras insignificantes de la tracción a costa de la maniobrabilidad. Hay mejores opciones para atravesar el terreno, como un 4x4.
Ventajas¶
Muy bueno atravesando terrenos
Fantástica tracción y potencia de empuje
Desventajas¶
Sufre en maniobrabilidad y velocidad punta
Muy compleja de aplicar
Los tacos son propensos a romperse y pueden caerse con facilidad
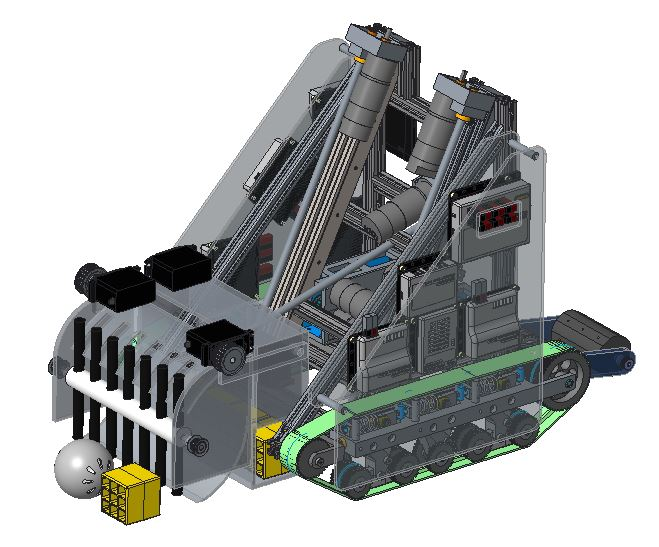
5975 Cybots, Res-Q¶