Enlaces#
Existen muchos tipos de enlaces. A menudo, se utilizan para convertir movimientos rotativos, como los de un servomotor, en movimientos lineales. Los enlaces pueden hacerlo de forma eficiente y también tienen patrones de movimiento especializados que pueden hacerlos deseables para ciertos mecanismos.
Término
- Enlace#
Sistema de eslabones o barras sólidas conectadas a otros dos o más eslabones mediante bisagras, articulaciones deslizantes, rótulas, etc., para formar una cadena cerrada o una serie de cadenas cerradas. Generalmente se utiliza para convertir el movimiento lineal en movimiento de rotación o viceversa.
Consideraciones#
Hay que tener en cuenta varias cosas a la hora de construir un enlace.
El sobrecentrado se produce cuando un enlace se gira más allá de su punto central (normalmente el punto en el que ambas barras del enlace son paralelas). Sobrecentrar un enlace puede tener algunas ventajas, como hacer que el enlace sea más difícil de conducir hacia atrás. Vea este video informativo de youtube para más detalles sobre esto. Básicamente, los enlaces pueden formar una estructura en la que al empujar el enlace se mueve el robot en lugar de girar el enlace.
Los enlaces no tienen una velocidad o fuerza lineal constante. Por lo general, alcanzan una velocidad y una fuerza máximas cuando las barras están perpendiculares, y la velocidad y la fuerza disminuirán a medida que el enlace gire más.
Puede ser útil para comprobar si el enlace hará lo que usted quiere que haga. Vea este youtube video para un ejemplo de cómo configurar las relaciones de posición en OnShape.
Tipos de enlaces comunes#
Rieles de enlace#
Un uso común de los enlaces es accionar una extensión lineal. Esto permite un método compacto de convertir el movimiento de rotación de un motor o servo en movimiento lineal moviendo un mecanismo como los rieles de los cajones. Generalmente, para construir estos enlaces se utiliza una articulación de dos barras con componentes de articulación de bolas multigrado.
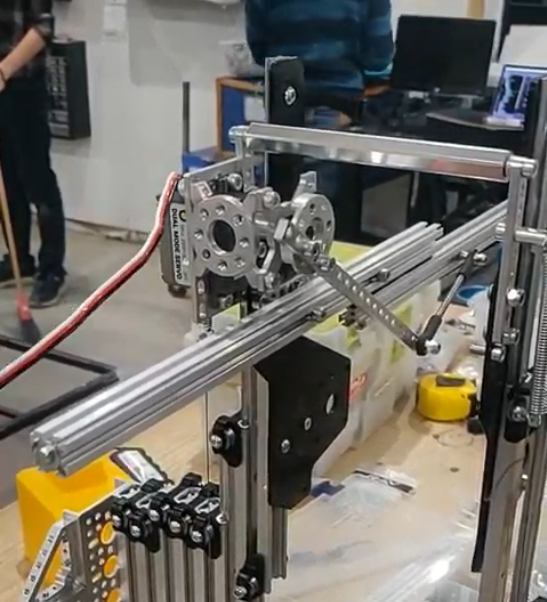
7236 Recharged Green, Skystone#
Cuatro barras#
Un tipo de enlace se denomina enlace de cuatro barras. Se trata de un enlace que mantiene la barra final en el mismo ángulo con respecto al suelo en todo momento. Por ejemplo, si la barra final de una barra virtual de cuatro está paralela al suelo cuando está retraída, estará paralela al suelo en todo momento, incluso cuando esté completamente girada. Esto es beneficioso para mecanismos como las garras, que se quieren paralelas al suelo durante su funcionamiento. Además, las cuatro barras pueden proporcionar extensión fuera del marco del robot, y generalmente proporcionan extensión tanto vertical como horizontal debido al «arco» que sigue el brazo. Además, el material de construcción de las cuatro barras puede seleccionarse cuidadosamente para ahorrar peso.
Este mecanismo no se utiliza mucho en los FTC debido a los requisitos de espacio. Las barras de acoplamiento que mantienen la barra final paralela limitan el recorrido de las cuatro barras a menos de 180 grados (menos de 90 grados en cualquier dirección) sin una construcción mecánica especializada, y las barras también ocupan espacio en el marco del robot.
Ejemplo CAD de cuatro barras (Haga clic para ampliar)
Haga clic aquí para abrir este ejemplo en Onshape Cad, donde puede hacer clic y arrastrar las piezas para ver cómo se mueven. <https://cad.onshape.com/documents/45549489f570f3694569a2df/w/85ff26b9fca4988ebc4df3b4/e/204f2654fb268fb556c1b7b1>`_.

Cuatro Barras Virtual#
La alternativa más popular al enlace de cuatro barras es un enlace de cuatro barras virtual. Aunque técnicamente no es un enlace, un cuatro barras virtual utiliza cadenas o correas para crear un efecto similar al de un cuatro barras, en el que el efector final se mantiene en un ángulo fijo con respecto al suelo en todo momento. Debido a que se elimina la necesidad de barras adicionales, este «enlace» puede desplazarse más de 180 grados, y también puede ocupar menos espacio que un enlace de cuatro barras tradicional.
Este mecanismo se utiliza más en FTC, ya que es una adición fácil a un brazo para mantener el ángulo del efector final en relación con el suelo.
Nota: Tanto la cadena como la correa pueden utilizarse para construir un cuatro barras virtual, y no hay ninguna ventaja específica en utilizar una u otra. Debido al hecho de que la cadena no tiene que girar completamente alrededor del piñon, un zip-tie se puede utilizar para tensar la cadena, por lo que la construcción más fácil.
Ejemplo CAD de cuatro barras virtuales (Haga clic para ampliar)
Haga clic aquí para abrir este ejemplo en Onshape Cad, donde puede hacer clic y arrastrar las piezas para ver cómo se mueven. <https://cad.onshape.com/documents/45549489f570f3694569a2df/w/85ff26b9fca4988ebc4df3b4/e/62097ae7e6d154b9232d8957>`__.

7244 OUT of the BOX Robotics, Ultimate Goal#
Cuatro barras en Doble Invertido#
El cuatro barras doble invertido es una extensión del enlace de cuatro barras que permite una mayor extensión. Un cuatro barras doble invertido consiste en un enlace de cuatro barras con un segundo enlace de cuatro barras montado en el extremo de la primera. Esto permite una extensión puramente lineal, a diferencia del «arco» que realiza un cuatro barras simple. El efector final permanecerá en un ángulo fijo respecto al suelo debido a la extensión puramente lineal.
Este mecanismo no está muy usado en FTC debido al gran espacio que suele requerir, pero es un método bastante compacto para producir grandes cantidades de extensión lineal. Hay que tener cuidado de que cada lado de un cuatro barras doble invertido se accione por igual para que no surjan problemas de elevación asimétrica.
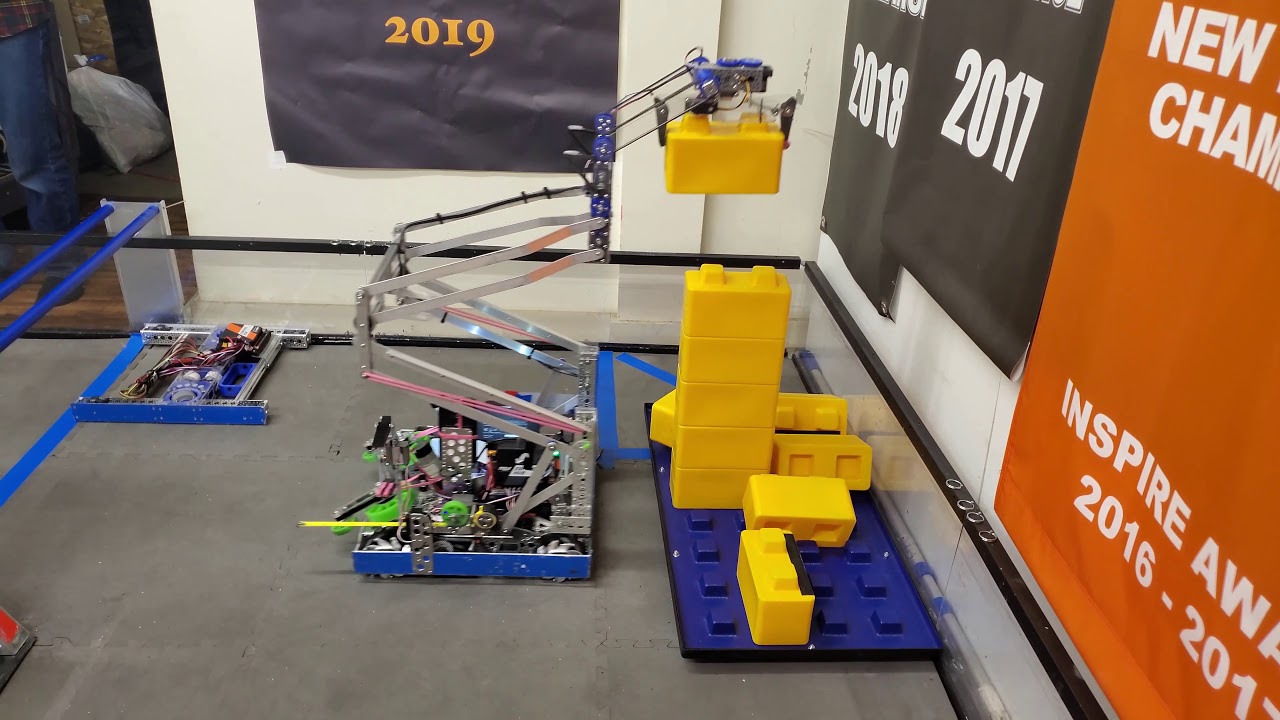
11115 Gluten Free, Skystone#
Cuatro Barras Doble Invertido Virtual#
Al igual que el cuatro barras virtual, el cuatro barras doble invertido virtual es un enlace que utiliza correas o cadenas para sustituir las barras del enlace del cuatro barras doble invertido virtual. El cuatro barras doble invertido virtual es simplemente un cuatro barras virtual en la que el piñón/polea del efector final tiene la mitad de tamaño que el piñón/polea estático, lo que da lugar a una relación de transmisión de 2:1. A continuación, se monta una barra en el piñón/polea del efector final y se hace funcionar otra cadena/correa, lo que crea un movimiento puramente lineal con un efector final que siempre está en el mismo ángulo con respecto al suelo. Esto crea un movimiento lineal mucho más compacto que un cuatro barras doble invertido, y también puede extenderse en ambas direcciones.
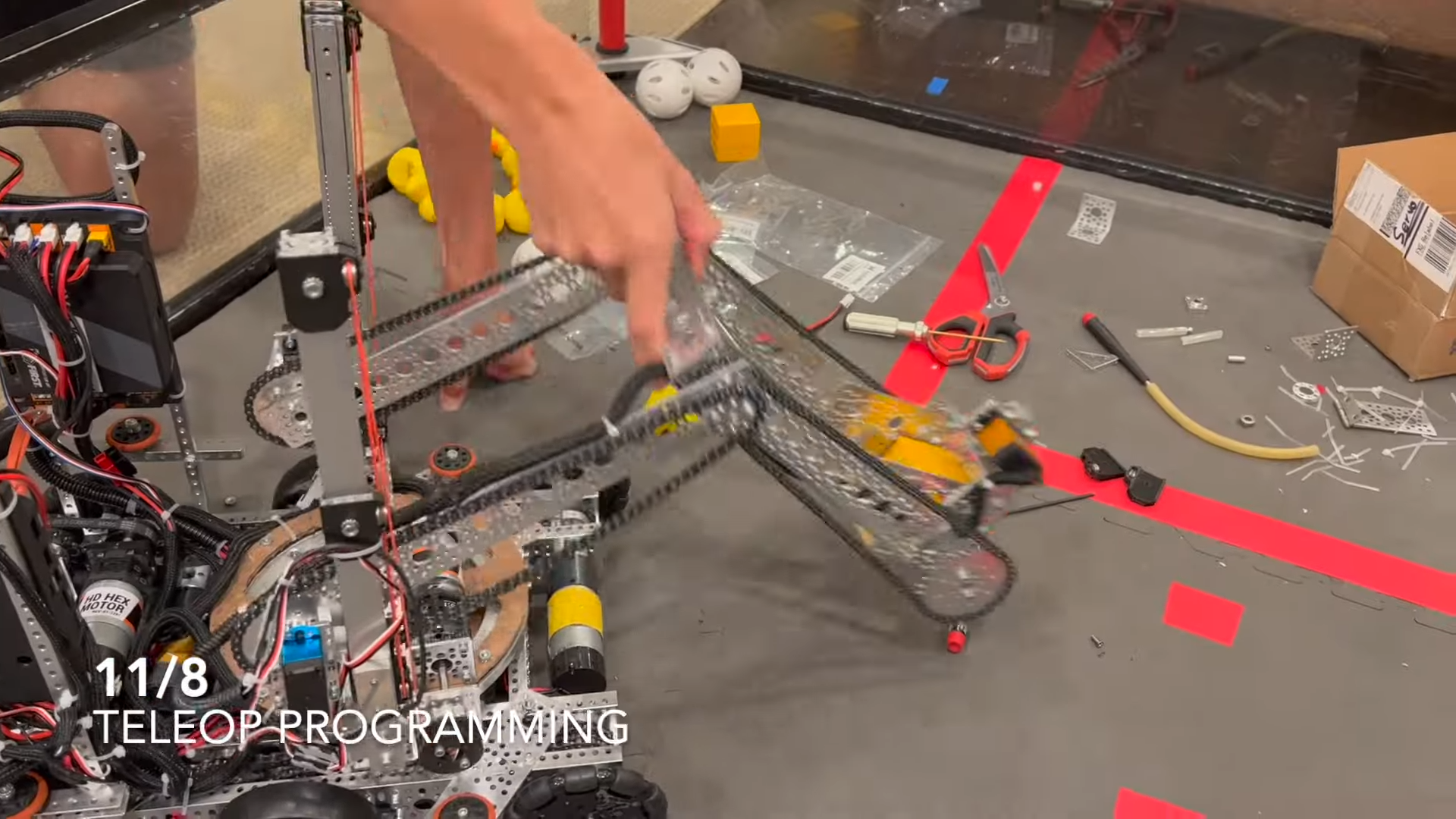
8644 Brainstormers, Freight Frenzy#