Guía de cableado#
¿Por qué es importante el cableado?#
¿Alguna vez has mirado dentro de tu robot y pensado «¡qué desorden de cables»? El cableado es extremadamente importante en FTC®, pero a menudo se pasa por alto o se hace apresuradamente una hora antes de que comience la competencia. Sin embargo, el tiempo invertido en cablear correctamente el robot es crucial para el rendimiento y mantenimiento del robot.
Atención
Es muy desalentador que los equipos pasen por alto el cableado, pero muchos equipos nuevos parecen ignorarlo o darle poco pensamiento a cablear correctamente el robot.
Aunque tedioso y a menudo no divertido, el cableado puede significar la diferencia entre una victoria y una derrota. El mejor robot del mundo no podrá funcionar si un cable está suelto o se enreda en medio de una partida. Por lo tanto, es imperativo que el cableado se planifique cuidadosamente al diseñar y construir un robot.
FIRST® Guía de cableado de FTC#
FIRST ha creado una guía de cableado para ayudar a los equipos con tareas como el engarzado de cables, la soldadura de conexiones y la mitigación de ESD que no se cubrirán en esta guía. Una vez que hayas leído sobre electrónica y cableado aquí, consulta la Guía de cableado de FTC para conocer las mejores prácticas y más consejos y trucos. Además, FIRST ha escrito un Whitepaper de mitigación de ESD que vale la pena revisar.
Consejos generales#
¡Siempre etiqueta los cables! Cuando están agrupados, es posible que no sepas qué cable va en qué puerto.
Amarra los cables sueltos, y aún mejor, amarra ese montón de cables a un componente estructural. Esto asegurará que los cables no interfieran con tus mecanismos.
¡Presta atención a los números de puerto! El REV hub a menudo tendrá múltiples puertos por conector en el REV hub. REV tiene una guía del esquema de conexiones para evitar confusiones.
Trata cada conexión de cable como un punto de falla. Por lo tanto, utiliza cinta eléctrica para envolver e aislar las conexiones y utiliza alivio de tensión tanto como sea posible.
El alivio de tensión debe utilizarse en todas partes posible. Se recomienda encarecidamente que los equipos utilicen productos como el REV Montaje de retención USB, así como métodos de alivio de tensión de impresión 3D para dispositivos como el Expansion Hub y los teléfonos controladores de robots.
NO suelde un cable antes de engarzarlo. La soldadura puede «deslizarse» y es posible perder la conexión, lo que podría provocar un incendio.
Mantenga todas las conexiones de cables lo más cortas posible para evitar enredos y mejorar la gestión de cables.
Cuando se utilizan cables de datos/sensores, manténgalos alejados de los motores. Esto reducirá la interferencia electromagnética (EMI). Agregue un núcleo de ferrita si es posible.
Los conectores engarzados son generalmente mejores que los conectores soldados, ya que las uniones soldadas pueden romperse más fácilmente que una conexión engarzada.
Mantén los cables alejados de los mecanismos en movimiento, y asegúrate de no correr el riesgo de que un mecanismo enganche un cable. Esta es una aplicación adecuada de materiales como el acrílico, que permite a los conductores del robot ver dentro del robot mientras mantiene los cables fuera del alcance de otros robots/piezas de juego. Se recomienda que los equipos adquieran sujetadores de velcro removibles o bridas/cinchos para ayudar con la gestión de cables.
Para los cables de alimentación, es preferible utilizar cables de :term:`calibre <Gauge>` más bajo (mayor tamaño). Esto significa una resistencia más baja a través del cable y un mayor flujo de energía. Sin embargo, esto es insignificante para los cables de datos.
Los cables y alambres pequeños son frágiles. Trátalos como tal y no los coloques en un área donde constantemente sean golpeados por otro objeto. Los cables de alimentación más grandes pueden resistir mucho más abuso.
Asegúrese de que sus cables se mantengan alejados de los puntos de pellizco donde otro mecanismo pueda atrapar el cable. Esto es especialmente importante en brazos o mecanismos articulados.
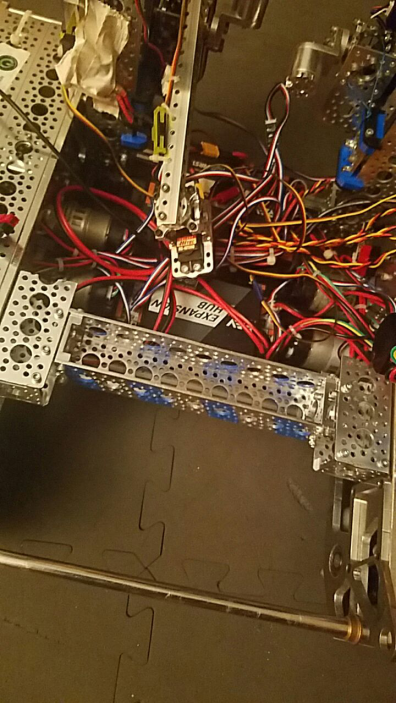
¡Mal ejemplo de cableado!#


Buen ejemplo de cableado por 731 Wannabee Strange, Rover Ruckus#

Buen ejemplo de cableado por 8417 “Lectric Legends#

Buen ejemplo de cableado por 7244 Out of the Box Robotics#
Cuando hagas la instalación eléctrica, también tómate el tiempo para planificar un diseño específico para tus cables y cómo se distribuirán por todo el robot. Dedica el tiempo necesario para organizar algo como un panel electrónico si es necesario. Al construir el robot, destina un espacio adecuado para la instalación eléctrica. Esto podría significar montar un tubo de PVC y hacer pasar los cables desde la parte trasera del robot a través de él, o simplemente usar velcro o sujetadores de plástico.
Truco
Asegúrese de que los cables sean lo más cortos posible para reducir el riesgo de enredos.
Sin embargo, a medida que los componentes se mueven fuera del robot, los cables se mueven con él. Atar cada pulgada suelta resultará en la desconexión del cable. El cableado es el arte de encontrar el equilibrio perfecto entre la longitud más corta y permitir la suficiente libertad que los mecanismos necesitan.
También se recomienda que los dispositivos electrónicos se monten sobre un material no conductor, como la madera, para prevenir la ESD.
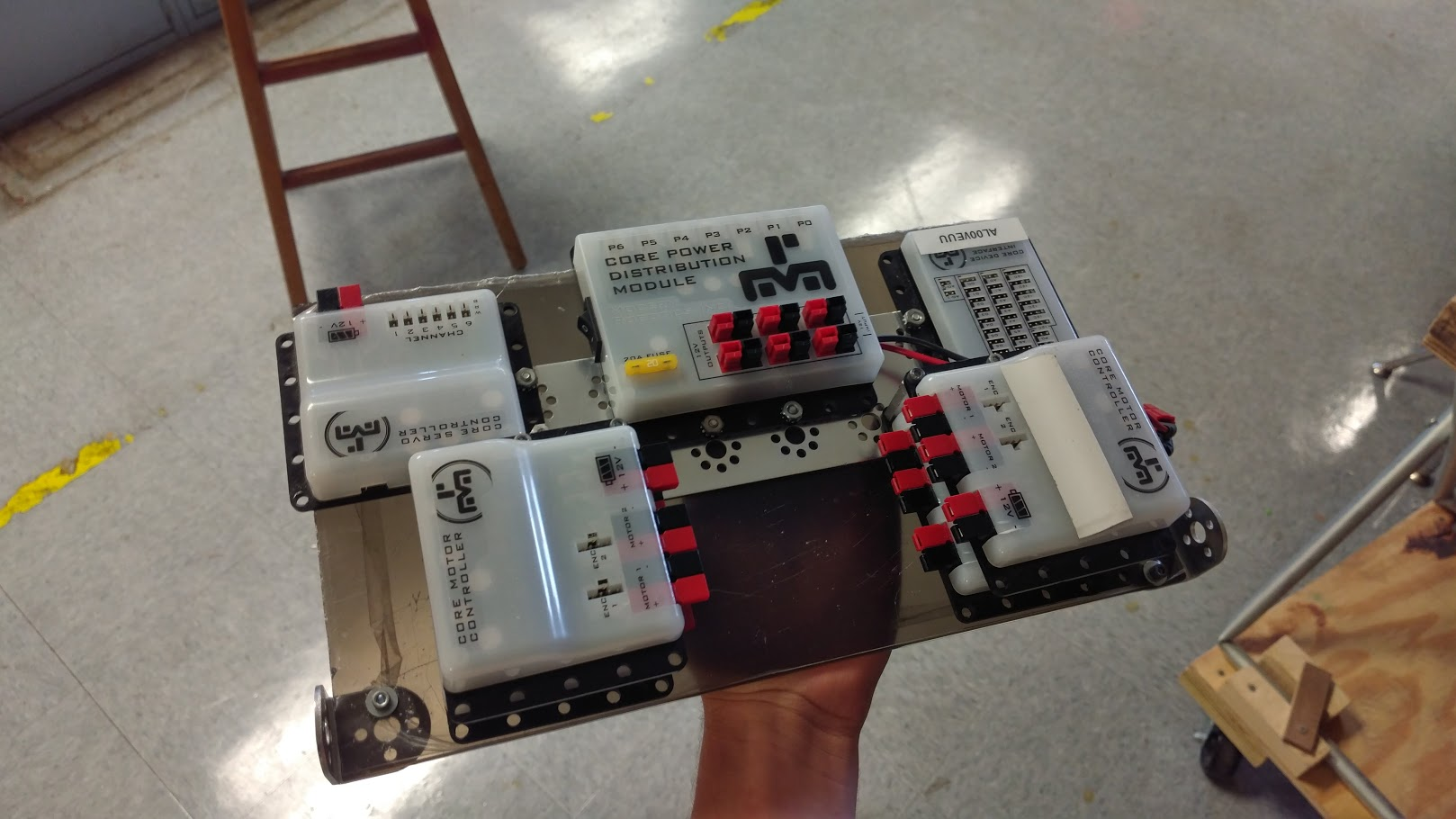
3736 Serious Business#
Recomendaciones específicas#
Módulo de energía#
Ten en cuenta que los conectores XT30 pueden desgastarse significativamente más rápido que los conectores PowerPole. Además, debido a que los conectores XT30 están soldados, pueden romperse mucho más fácilmente que las conexiones PowerPole.
El cableado para la alimentación del módulo debe ser al menos de calibre 14awg, si no es de calibre 12awg. Ten en cuenta que debe ser cable trenzado, no sólido.
Energía del motor#
El cableado para la energía del motor debe ser entre 16awg y 12awg. Nuevamente, cable trenzado, no sólido.
Algunos motores (como el REV HD Hex y el Core Hex) tendrán conectores de alimentación removibles en la parte posterior, mientras que otros motores (como el Andymark NeveRests) tendrán un cable soldado permanentemente en la parte posterior. Es mucho más conveniente tener un conector en la parte posterior, o en su defecto, tener un enchufe muy corto en la parte posterior del motor. Una vez que los cables estén instalados y asegurados, sacarlos no será divertido.
Cables del servo#
Usar cables de extensión de alta resistencia es recomendado.
Encinta las conexiones entre los cables de extensión y los cables del servo con cinta eléctrica. Esto se debe a que las conexiones pueden aflojarse con el tiempo y son fáciles de sacar.
El Controlador de Motor VEX 29 tiene el conector de género incorrecto en el extremo de 3 pines. Se requiere que utilices un cable adaptador o agregues el conector correcto a los cables (recomendado). Asegúrate de proteger el MC29, ya que es frágil y propenso a fallar si recibe impacto de otro objeto.
USB#
Las USB son generalmente un conector resistente, pero tiende a desgastarse con el tiempo. Evita enchufar/desenchufar estos cables más de lo necesario, especialmente en los teléfonos RC/DS.
Las USB aman el alivio de tensión. Para mantener las desconexiones bajas, asegure los cables para dejar la menor cantidad de cables sueltos en el robot como sea posible.
Cables del sensor / Cables del encoder#
Los cables del sensor y sus conectores pueden ser increíblemente frágiles. Tenga cuidado al enrutamiento y mantenga holgura en el extremo del conector al agregar alivio de tensión al cable.
Los conectores de datos JST en el REV Expansion Hub y Control Hub tienen +5v, GND y dos pines de datos. Si estás utilizando un sensor digital o analógico que no utiliza I2C, puedes usar un cable Y que permite conectar dos sensores a un solo puerto.
Misceláneo#
- Correa de puesta a tierra REV
La Correa de Puesta a Tierra REV <Grounding Strap> es actualmente la única forma legal de poner a tierra tu robot. Conecta el extremo al componente metálico del marco de tu robot y enchufa el extremo del conector XT30 en un puerto XT30 libre de tu robot.
- Bloques/paneles de distribución de energía
El Bloque de Distribución de Energía REV permite a los equipos tener más de cuatro conectores XT30 (2 en cada Expansion Hub). El bloque se puede conectar al Módulo de Energía del Servo para aumentar el voltaje de los servos.
- Hojas para secadora
Las hojas para secadora se pueden usar para limpiar el robot después de cada partida con el fin de reducir la acumulación de estática. Esto no es recomendado directamente por FIRST o cualquier proveedor, pero nuestra evidencia empírica a lo largo de los años sugiere que ayuda, o al menos, no hace daño hacerlo. Sin embargo, las hojas para secadora pueden o no estar en el límite de la legalidad, ya que conectar el robot a tierra es ilegal.
- Staticide/spray estático
Staticide es un spray que ayuda a mantener la estática fuera del robot. Por favor, asegúrese de rociar su robot antes de un evento y no durante el evento.
- Causas comunes de estática
Cada punto de contacto de tu robot con el piso aumentará la acumulación de estática.
Demasiado desgaste al girar (o tracción cuando las ruedas intentan girar). Esto es posible si se utiliza un 4WD o un 6WD (sin caída central) con todas las ruedas de tracción.
Una parte conductora arrastrándose por el suelo. Por ejemplo, trata de evitar que el intake toque el suelo cuando el robot se esté moviendo tanto como sea posible. Las ruedas de espuma y los rodillos de espuma son un culpable común.