Potencia del motor#
Como cualquier aparato eléctrico, los motores consumen una cierta cantidad de energía para funcionar. Los motores convierten una parte de la potencia de entrada en energía de giro del eje; esta parte es la potencia de salida. Pensar en los motores en términos de energía en lugar de velocidad y torque puede facilitar el cálculo de su uso y proporcionar herramientas para elegir la relación de engranajes óptima para una aplicación.
¿Qué es la potencia?#
Fundamentalmente, la potencia se define como la cantidad de energía transferida en un periodo de tiempo determinado. En la práctica, esto significa que la potencia es la cantidad de «energía» que se puede obtener del motor. La potencia de salida de un motor varía en función de la carga, pero no varía con la relación de engranajes del motor. Esto significa que un motor de giro libre 1:1 producirá la misma potencia que un motor de giro libre 100:1, pero la velocidad y el torque real serán diferentes. La potencia de salida es proporcional a la velocidad multiplicada por el torque, por lo que al cambiar la velocidad y el torque con una caja de engranajes, la potencia de salida debe seguir siendo la misma.
Otro dato, aunque no siempre tan útil, es la potencia de entrada del motor. La potencia de entrada del motor es el número de vatios de potencia que consume el motor, que es igual a la tensión enviada al motor multiplicada por la corriente que consume el motor. Los motores no son eficientes al 100%, por lo que para obtener una determinada potencia de salida a menudo se necesita el doble o incluso el triple de la potencia de entrada. Por ejemplo, un motor FTC estándar puede consumir hasta 65 vatios sólo para producir 29 vatios de potencia de salida.
Potencia máxima y Curvas del Motor#
Para saber cuánta potencia consumirá o producirá tu motor, es útil consultar una curva de motor. Estas son las hojas de datos que trazan la velocidad de salida del motor, el torque de salida, potencia de salida, y la eficiencia de todos en un gráfico. Cada motor legal FTC excepto el Core Hex ha sido probado en el banco de potencia, y sus datos están por debajo. Es seguro asumir que otros motores de corriente no limitada (como los servos) siguen curvas de forma similar, aunque con diferentes salidas de velocidad, torque y potencia.
Velocidad libre (RPM) |
Corriente libre (A) |
Potencia máxima (W) |
Stall Torque (N*m) |
Corriente de Calado (A) |
|
|---|---|---|---|---|---|
goBILDA (MATRIX) |
5900 |
0.3 |
29 |
0.19 |
11 |
NeveRest |
5500 |
0.4 |
26 |
0.17 |
9.8 |
REV Core Hex1 |
125 |
0.2 |
10 |
3.2 |
4.4 |
REV HD Hex |
6000 |
0.3 |
28 |
0.18 |
11 |
TorqueNado |
5900 |
0.2 |
26 |
0.17 |
9.8 |
- 1
Datos tomados directamente de la página del producto, no hay curva de motor disponible.

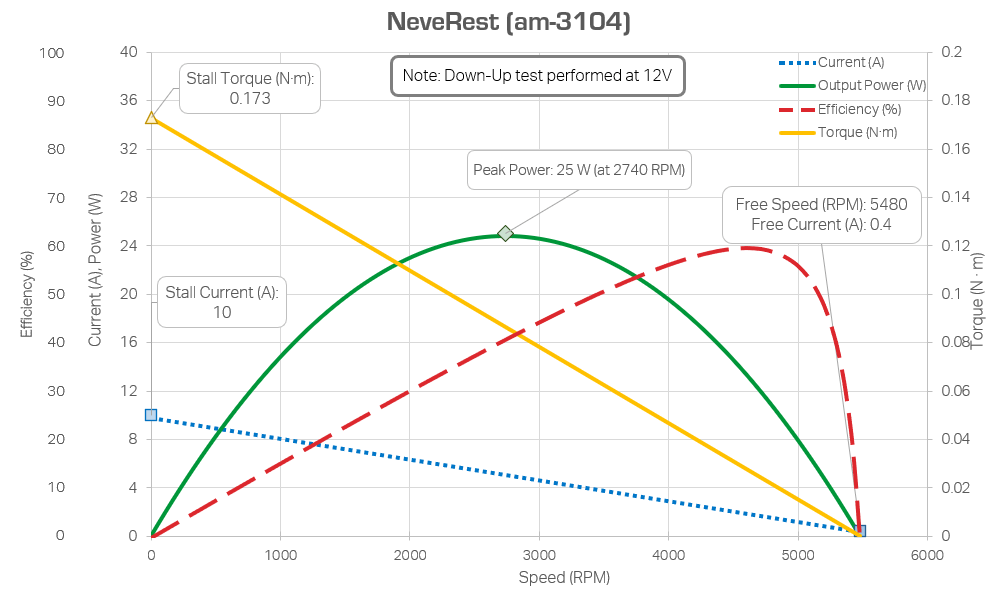
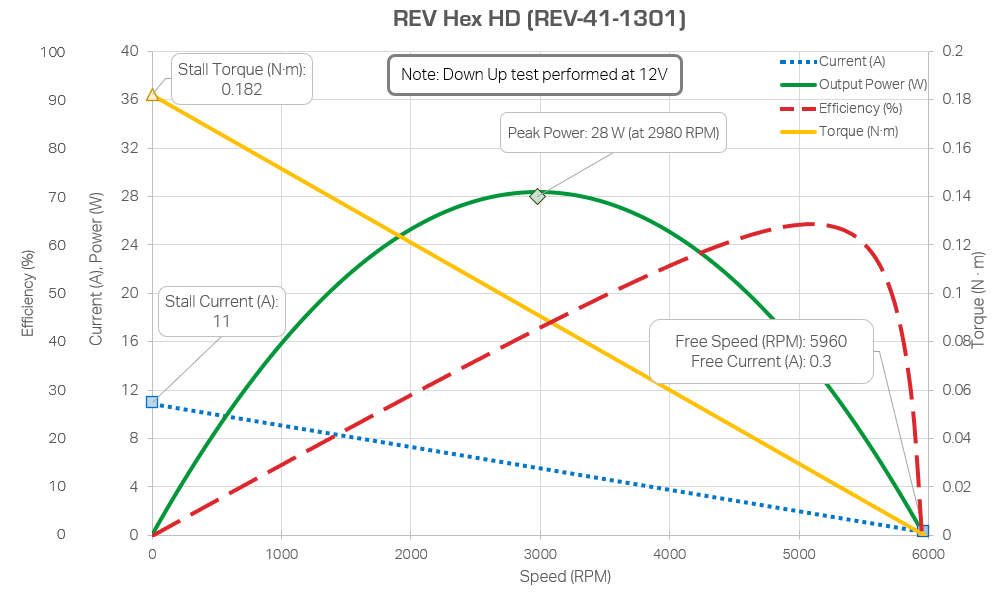
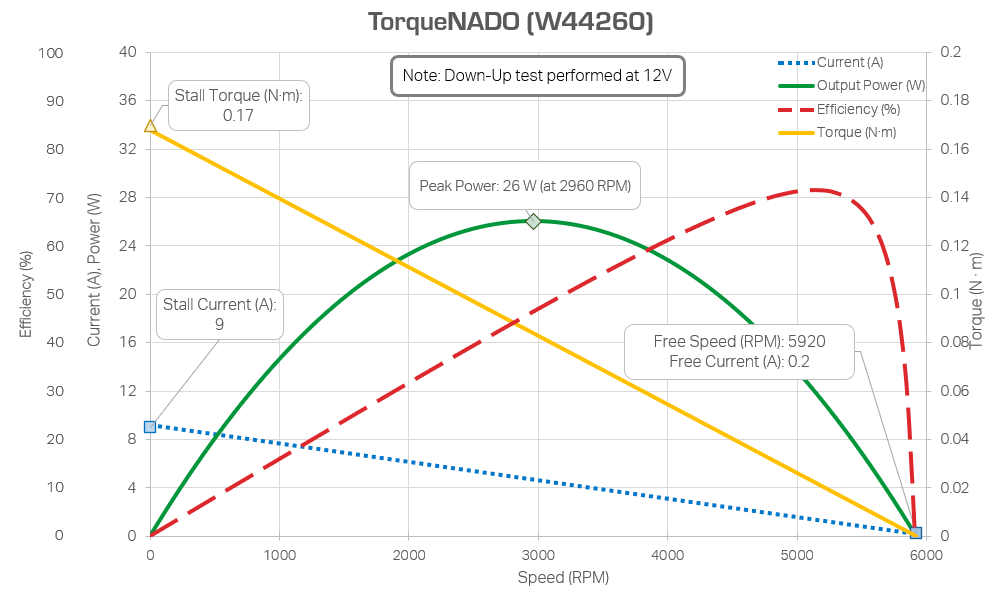
Una curva de motor representa un motor a 12 V (equivalente a ajustar la potencia del motor a 1 en el software) con varias cantidades de carga aplicadas al eje. Como puedes ver, la potencia de salida del motor no es constante, sino que aumenta hasta aproximadamente el 50% de carga, antes de caer de nuevo. Este punto al 50% de carga se denomina pico de potencia de salida del motor, y se encuentra en un punto similar (50% de carga) en todos los motores legales FTC.
La potencia variable de un motor significa que la velocidad y el torque de salida no cambian linealmente cuando se aplica más carga sobre el eje. En contra de la intuición, aplicar un 50% de carga a un motor no reduce su velocidad a la mitad, sino que la reduce ligeramente por encima del 50%. Del mismo modo, poner más del 50% de carga en un motor hará que la velocidad caiga más rápido que linealmente.
Además, se puede ver que la eficiencia aumenta a medida que aumenta la velocidad. Esto significa que, si el consumo de corriente es una preocupación, los motores deberían funcionar siempre con cargas inferiores al 50% de su torque de stall. Estas dos propiedades de un motor, la potencia máxima de salida que es el 50% del torque de stall y la eficiencia de un motor que es mayor cuanto menor es la carga, guían la selección de la relación de engranajes de un motor. Por lo general, las relaciones deben elegirse de modo que el torque de stall sea el doble del torque de carga medio del motor, y deben tender a proporcionar más torque del necesario en lugar de menos.
Nota sobre el Consumo de Corriente#
Al mirar las curvas de los motores, puede ver que la corriente de calado de los motores FTC puede llegar a 11 amperios por motor. Las baterías FTC sólo pueden proporcionar 20 A de corriente de salida antes de fundir el fusible. Sin embargo, incluso si no se alcanza el límite de 20 A, el consumo de demasiada corriente puede hacer que otros motores se sientan lentos o no respondan. Hay que tener cuidado de que no se paren más de dos motores al mismo tiempo.
Nota
Puede ignorar esta excepción cuando se trate de chasises mecánicos, ya que generalmente patinarán antes de que los motores alcancen su corriente de calado. Sin embargo, colocar relaciones de engranajes muy bajos o más de 4 motores en chasises de tracción puede superar el límite de corriente de una batería FTC.
Los motores pueden generar una «corriente transitoria», es decir, una gran cantidad de corriente durante un breve periodo de tiempo. Esto suele ocurrir cuando el motor empieza a moverse o cuando se le aplica una carga momentánea. Mientras que los transitorios generalmente no pueden hacer saltar un fusible, pueden causar otros problemas, como un control lento si es tirado por un motor, o bajo voltaje si el transitorio es tirado por un servo (se ha observado que los servos goBILDA Super Speed hacen esto ocasionalmente).