Brazos¶
Los brazos abarcan una gran variedad de mecanismos. En FTC, se utilizan para añadir extensión y flexibilidad a los efectores finales. Los brazos son especialmente potentes cuando se combinan con otros mecanismos, como la extensión lineal y las minitorretas.
Brazos para Extensión¶
Los brazos pueden ser una herramienta útil para la extensión. Los brazos largos necesitan grandes relaciones de reducción para su accionamiento. El ejemplo de la sección Brazo Único utiliza una reducción de 254,5:1. Se recomienda transferir el torque al brazo a través de un engranaje, cadena o correa en lugar de montarlo directamente en el eje de un motor debido a las fuerzas axiales y a la posibilidad de obtener una mayor reducción. Debido a la gran cantidad de impulso que estos brazos pueden llevar, si se detienen repentinamente pueden ser capaces de romper la caja de engranajes de un motor o incluso volcar su robot. El control por software puede ayudar a reducir la carga de las cajas de engranajes de los motores (véase Bucles de control).
Dependiendo de la aplicación y la implementación, los brazos pueden ser más rápidos o más lentos que otras opciones de extensión.
Brazo Único¶
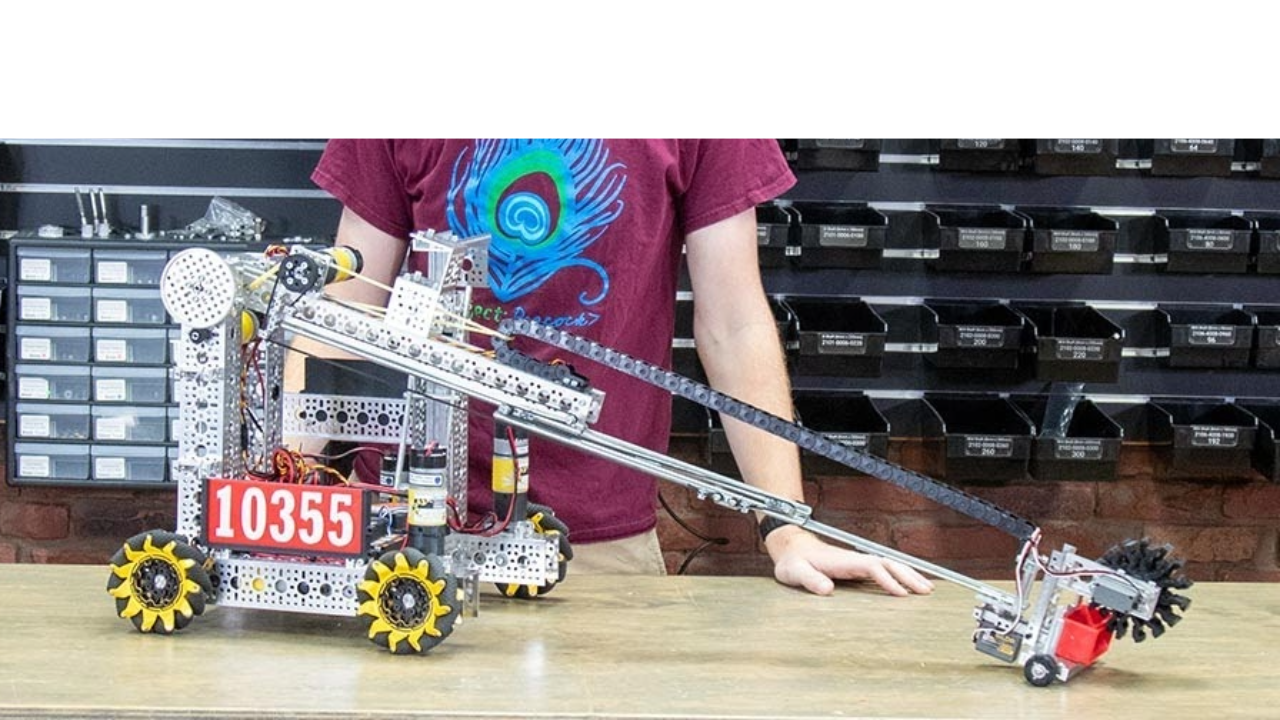
El tipo más simple de brazo, un brazo único se refiere a un brazo en un eje de rotación. Estos brazos son relativamente fáciles y rápidos de construir, sin embargo, tienen poca viabilidad competitiva a alto nivel como sistema de extensión principal, ya que la extensión que proporciona es limitada debido a las restricciones de longitud del cubo inicial, solo pudiendo proporcionar alrededor de 16» de extensión, mientras que en la mayoría de los juegos se desean más de 24» de extensión.

goBILDA starter bot, Into The Deep, brazo único utilizado para la extensión.¶
Extensión pivotante¶
Un mecanismo de extensión pivotante es un brazo con una extensión lineal (normalmente guías lineales) acoplada. Esto permite que la extensión lineal proporcione la longitud de extensión deseada para la extensión horizontal y vertical, junto con la eliminación de la necesidad de una etapa de transferencia.
goBILDA Robot in 3 Days, Into The Deep, guías lineales pivotantes¶

19098 Eastern Foxes, Into The Deep, Alianza Ganadora 1er Pick (Franklin), guías lineales pivotantes¶
8417 “Lectric Legends, Rover Ruckus, Finalista Alliance First Pick (Ochoa), brazo único + extensión lineal a medida accionada por correa¶
Brazos multieje¶
Un brazo multieje consta de múltiples articulaciones giratorias. Un brazo multieje proporciona la extensión de la que carecen los brazos simples, además de ofrecer mucha más flexibilidad a la hora de posicionar el efector final. Aunque los brazos multieje parecen la solución obvia a los problemas a los que se enfrentan los brazos de un solo eje, son mucho más difíciles de diseñar, fabricar y controlar, y presentan problemas de precisión, holgura y empaquetado, además de ofrecer pocas ventajas con respecto a las guías lineales y otros métodos de extensión.
Advertencia
Se desaconseja encarecidamente a los equipos de FTC sin experiencia.

11146 Barker Redbacks, Into The Deep, brazo multieje¶
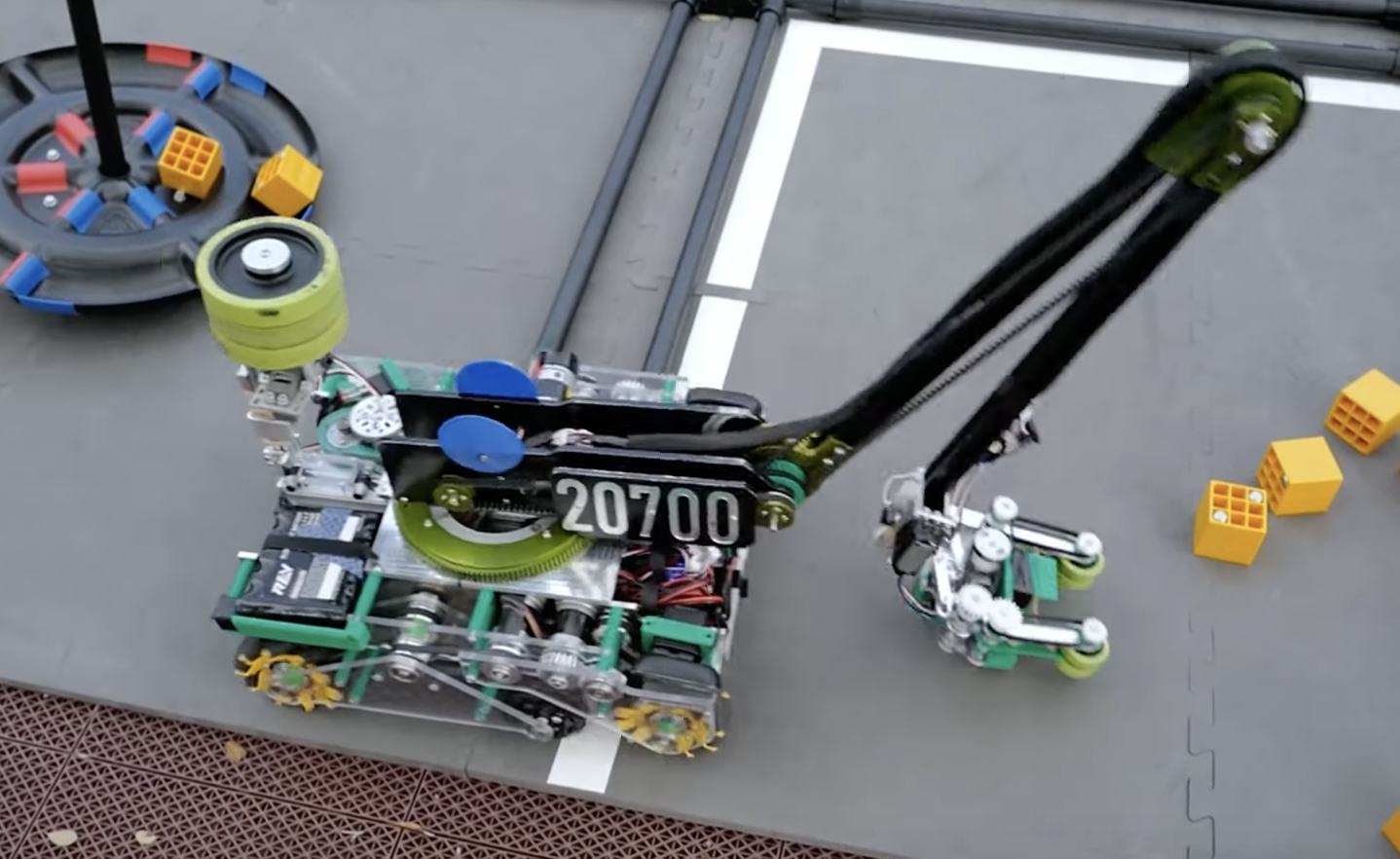
20700 Snap, Freight Frenzy, brazo multieje¶
Brazos para efectores finales¶
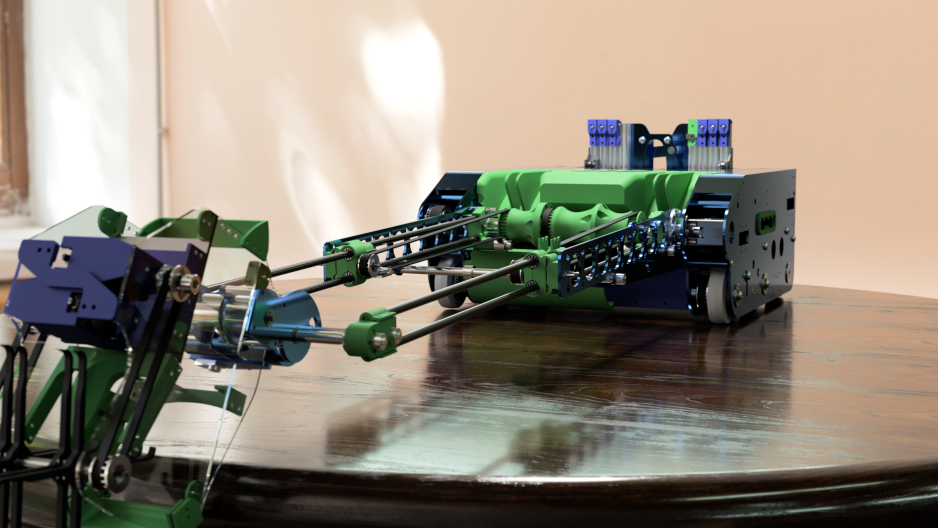
Los brazos son la forma más común de añadir flexibilidad y control a los efectores finales. Estos brazos suelen tener una o varias articulaciones giratorias y/o una extensión lineal. Debido a las necesidades de potencia relativamente pequeñas de estos brazos, a menudo se accionan mediante servos en lugar de motores.
Atención
Los efectores finales son propensos a colisiones y con los brazos actuando como una palanca, es imperativo tomar precauciones adicionales para montar y apoyar estos servos correctamente (ver Consejos de uso del servo).
Los brazos de uno o varios ejes pueden añadir control a la distancia vertical y horizontal de un efector final. En Into The Deep, este tipo de brazo era habitual en los intakes para permitir que el intake en una extensión horizontal sobrepasara la barrera sumergible y luego «alcanzara» las muestras. Pueden utilizarse para alinear los intakes y las outtakes para facilitar las transferencias o, en general, para añadir flexibilidad a la actuación de los efectores finales.
La extensión lineal suele verse en las outtakes para aumentar el alcance del depósito del robot.
15972 TehnoZ, Into The Deep, Capitán de Alianza Finalista (Edison), los brazos se utilizan tanto en el intake como en el outtake, la extensión lineal se utiliza en la outtake.¶
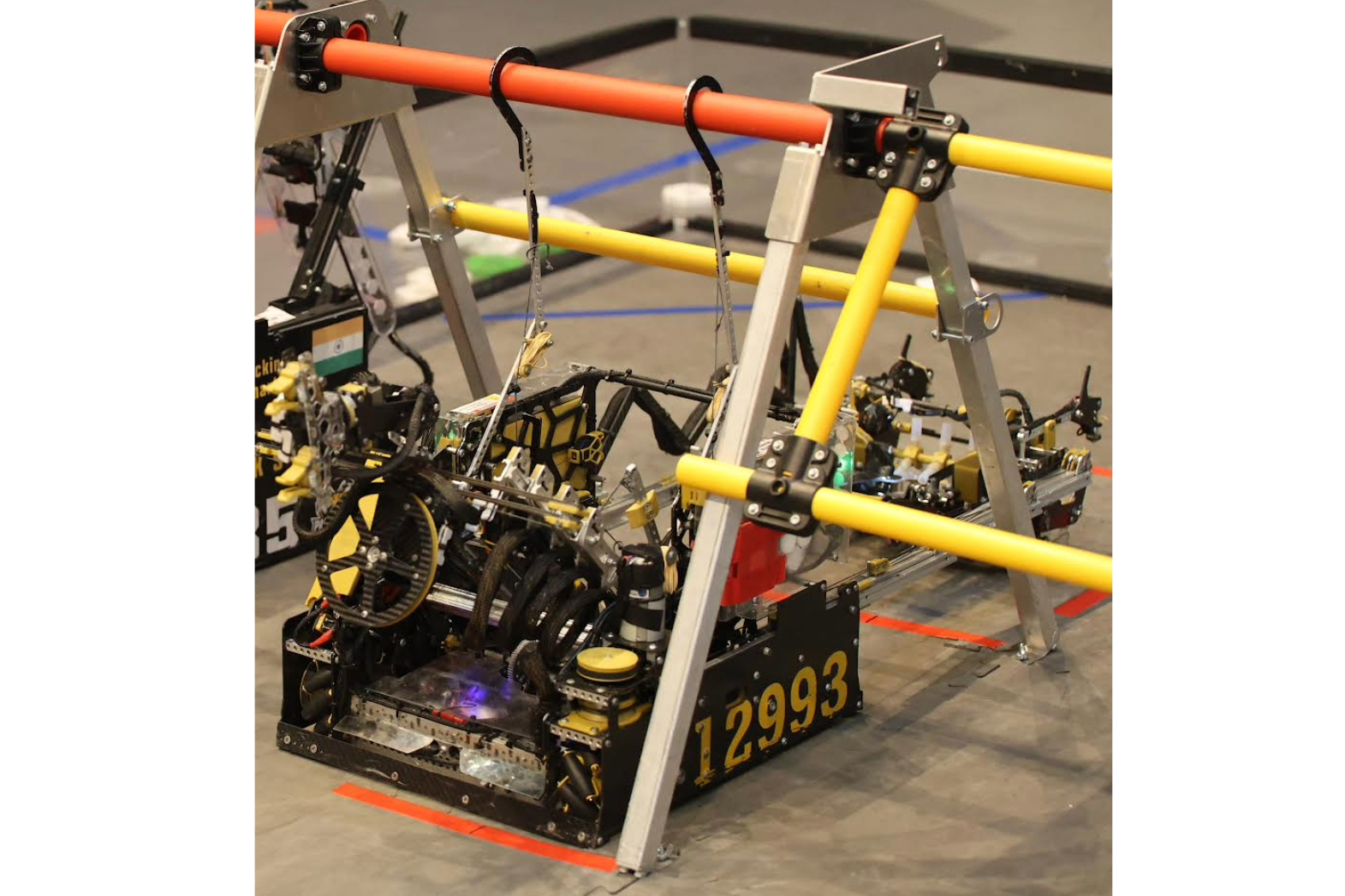
12993 RoboKings Aurum, Centerstage, Alianza Finalista 1er Pick, brazo de outtake de alto grado de libertad con extensión horizontal.¶