Chasises holonómicos#
Mecanum Drive#
Los chasises mecanum constan de cuatro ruedas mecánicas accionadas independientemente por un motor. Esta configuración angula la velocidad de cada rueda, lo que permite al robot derrapar.
Término
- Rueda Mecanum#
Las ruedas Mecanum son un tipo especial de ruedas que permiten una maniobrabilidad y un ametrallamiento holonómico a diferencia de las ruedas tradicionales. Consisten en una serie de rodillos de goma girados 45 grados a izquierda o derecha.
En un chasis mecanum convencional, el desplazamiento de las ruedas de una diagonal en dirección opuesta a las de la otra diagonal provoca un movimiento lateral. Las combinaciones de estos movimientos de las ruedas permiten el movimiento del vehículo en cualquier dirección con cualquier rotación del vehículo (incluida la ausencia total de rotación).
La principal ventaja del chasis mecanum es la maniobrabilidad que ofrece, sobre todo porque el robot puede ametrallar en lugar de girar y avanzar. Los rodillos de las ruedas mecanum forman un ángulo de 45 grados con el eje de rotación de la rueda, lo que significa que los chasises mecanum no pueden ametrallar tan rápido como pueden avanzar.
Esto puede explicarse analizando las fuerzas implicadas. Cuando cada rueda gira, aplica una fuerza de fricción al suelo, lo que mueve el robot. Cuando se mueve hacia delante, los dos conjuntos de ruedas izquierdas giran en la misma dirección a la misma velocidad, y los dos conjuntos de ruedas derechas giran en la misma dirección a la misma velocidad, lo que significa que las fuerzas no se oponen entre sí. Sin embargo, al ametrallar, ni las dos ruedas izquierdas ni las dos ruedas derechas giran a la misma velocidad. En muchos casos, incluso giran en sentidos opuestos.
Estas dos fuerzas opuestas hacen que los rodillos resbalen cada vez más, lo que angula la velocidad del robot a expensas de la tracción (más deslizamiento se traduce en una pérdida de velocidad). Sin embargo, las ruedas siguen patinando al avanzar, pero no tan drásticamente como al ametrallar.
Está es la principal desventaja de los chasises mecanum: no suelen tener mucha fuerza de empuje y, por tanto, son vulnerables a la defensa de un robusto tanque de tracción.
Debido al hecho de que las ruedas mecanum son más propensas a resbalar a causa de los rodillos diagonales, una adición opcional a los chasises mecanum es un mecanismo de odometría independiente con el fin de rastrear la ubicación del robot durante la autonomía.
Atención
Es importante señalar que para maximizar la eficacia y la estabilidad de los accionamientos mecanum, vistos desde arriba, los rodillos de cada rueda deben apuntar hacia el centro del robot, formando una X, en lugar de un rombo.
La razón principal es que permite al chasis girar mucho más rápido de lo que podría hacerlo de otro modo. Cuando se utiliza la configuración sugerida, si se mira desde la parte inferior del robot, los rodillos forman un rombo. Esto permite que la fuerza aplicada por las ruedas sobre el suelo actúe tangente al radio de giro, lo que se traduce en un giro más rápido.
Consulte este vídeo y este otro vídeo para una explicación más detallada.
Ventajas#
Fantástica maniobrabilidad y agilidad gracias al ametrallamiento, puede evitar muy bien la defensa
Buena aceleración, puede tener una alta velocidad máxima
Chasis muy versátil para casi cualquier juego
Desventajas#
Sufre en la tracción, ya que los rodillos mecanum tienen un coeficiente de fricción inferior al de las ruedas de tracción; no puede atravesar terrenos
Capaz de ser presionado en defensa
Las ruedas deben alimentarse de forma independiente, por lo que no hay redundancia
Ejemplos CAD de Mecanum Drive (Haga clic para ampliar)

Configuración para ruedas mecanum, cortesía de goBILDA#
Miniguía de ruedas Mecanum#
Una de las características más importantes de una rueda mecanum es el mecanismo que permite que el rodillo gire: casquillos o rodamiento de bolas. Los mecanums que utilizan rodamientos de bolas traccionan mejor que los que utilizan casquillos, ya que los rodillos pueden girar con menos fricción.
Nota
En el pasado, algunos equipos han invertido en ruedas mecanum de 6 pulgadas de diámetro. Éstas suelen ser mucho más caras y, por lo general, no aportan ventajas significativas en cuanto al rendimiento. Recomendamos encarecidamente utilizar ruedas de entre 3 y 4 pulgadas de diámetro.
Recomendado#
Estas ruedas son el estándar de oro de las ruedas mecanum, si usted está comprando nuevas ruedas mecanum hay muy pocas razones para comprar cualquier rueda mecanum no de esta sección.
goBILDA Mecanum Wheels v2 ($127.49 dólares con descuento de equipo): Las Ruedas Mecanum goBILDA v2 son el estándar de oro para los equipos que desean un diseño de calidad en todos los aspectos. Cuentan con un diámetro de 96 mm y un espesor de 38 mm, con rodamientos de bolas de apoyo, 70A rodillos durómetro que proporcionan un excelente rendimiento ametrallando. Con el uso de 16x16mm empotrado y 32x32mm agujeros, estas ruedas tienen la mayor cantidad de opciones de montaje y puede adaptarse a todos los estilos de eje de uso común en FTC®.
REV Robotics Mecanum Wheels <https://www.revrobotics.com/rev-45-1655/>`_ ($127.50 dólares con descuento de equipo): Las Ruedas Mecanum de REV Robotics tienen un diámetro de sólo 75 mm, proporcionando una opción de rueda mecanum más pequeña a los equipos de FTC; sin embargo, no son la opción más delgada con 40,8 mm de grosor. Incorporan rodillos con rodamientos de bolas que proporcionan una tracción y una capacidad de ametrallamiento excepcionales. El patrón de agujeros de estas ruedas es compatible con Andymark Nubs, así como el REV Robotics Universal Hex Adapter v2 (que se incluye), sin embargo, con el fin de utilizar otras opciones de eje el uso de un adaptador o modificación física probablemente será necesario.
Viable#
Estos mecanums tienen un rendimiento aceptable, pero hay muy pocas razones para comprarlos en este momento, ya que han sido sustituidos por otros mejores. Si ya los tiene, son una opción viable, pero considere la posibilidad de buscar algunos de los mecanums de la sección Recomendados.
Nexus Rodamiento de Bolas Ruedas Mecanum ($134.00 dólares): Estas ruedas tienen 100 mm de diámetro y 59 mm de ancho. Tienen una excelente tracción gracias al uso de rodamientos de bolas. Sin embargo, son más caras, ocupan más espacio, tienen menos tracción y son más difíciles de montar que las ruedas recomendadas.
goBILDA Mecanum Wheels v1 (descatalogado): Estas ruedas son muy similares a las Nexus Rodamiento de Bolas Ruedas Mecanum, pero con un esquema de color diferente y mejores opciones de montaje.
Andymark Heavy Duty Mecanum Wheels ($225 dólares): Estos son fácilmente los más caros mecanums en la lista. Estas ruedas son de 4 «de diámetro y 1,65» de ancho. Se trata de mecanums basado en casquillos, por lo que si bien ametralla decentemente todavía realizan peor que los basados en rodamientos. Tienen una buena cantidad de tracción, más que el cojinete Nexus o ruedas casquillos.
Nexus Bujes Ruedas Mecanum ($80.00 dólares): Este es el Nexus Rodamiento de Bolas Mecanum Rueda con casquillos en lugar de rodamientos de bolas. No hay mucho que decir acerca de ellos, excepto que ametrallan decentemente, pero peor que el equivalente basado en rodamientos de bolas.
No Recomendado#
No hay casi ninguna razón para utilizar estas ruedas mecanum—tienen un rendimiento muy pobre y no son mucho más baratas que las de la sección Recomendadas. No podemos recomendar su uso en un robot FTC; si es posible, sustitúyalas por las mecanum de la sección `Recomendadas`_.
TETRIX Mecanum Ruedas ($149.00 dólares): Estos mecanums están diseñados basados en casquillos, rodillo de plástico duro que a su vez crea un pobre rendimiento ametrallador. El cubo integrado es un tornillo de fijación basado en el diseño con un agujero redondo, causando falta de fiabilidad, así como ocupar espacio extra.
Andymark Standard Duty Mecanum Wheels ($77.00 dólares): Estas ruedas apenas ametrallan y son super frágiles.

8103 Null Robotics, Rover Ruckus, usando cojinete Nexus mecanum#
731 Wannabee Strange, Rover Ruckus, usando ruedas de mecanum HD de AndyMark.#
X-Drive#
X-Drive es un chasis holonómico basado en omni-ruedas. Este tipo de accionamiento consiste en montar 4 ruedas omnidireccionales en la esquina del robot en un ángulo de 45 grados.
Una diferencia notable entre X-Drive y mecanum es la velocidad de desplazamiento lateral. Mientras que, como se menciona en la sección de mecanum, la relación entre la velocidad de desplazamiento lateral y la velocidad hacia adelante es notablemente menor que 1, la relación en un X-Drive es exactamente 1 debido a la simetría rotacional de la colocación de las ruedas. Esto significa que la velocidad de desplazamiento lateral y la velocidad hacia adelante de un robot X-Drive son equivalentes. Sin embargo, las transmisiones son más lentas cuando se desplazan lateralmente a 45° (aproximadamente \(\frac{\sqrt{2}}{2}\) de su velocidad hacia adelante).
Aunque X-drive tiene una buena capacidad de giro y aceleración, su principal inconveniente es el factor empaque/forma. El empaquetado se refiere a la facilidad/conveniencia con la que la transmisión encaja en el diseño general del robot.
Lo ideal es que el chasis ocupe el menor espacio posible para que sea más fácil diseñar mecanismos a su alrededor. Como las ruedas omnidireccionales están desplazadas, empaquetar un X-Drive es más difícil que otros tipos de accionamiento holonómico, como el mecanum o el H-Drive. Además, debido a su extraño diseño, es relativamente difícil transferir la potencia de los motores a las ruedas, por lo que la mayoría de los X-Drives acaban siendo de transmisión directa, lo que perjudica la vida útil de la caja de engranajes del motor.
Nota
Cuando se utiliza X-Drive, el robot se desplaza hacia delante/atrás/de lado a lado \(\sqrt{2}\) veces más rápido que un chasis con ruedas en la orientación normal (con la misma relación de engranes y el mismo tamaño de rueda).
Para saber a qué se debe exactamente, consulte este análisis.
Ventajas#
Buena maniobrabilidad y agilidad
Buena aceleración
Desventajas#
Propenso a la defensa, se le empuja con facilidad
A menudo utiliza accionamiento directo debido a su incómodo factor de forma

731 Wannabee Strange, Velocity Vortex#

5040 Nuts and Bolts, Relic Recovery#
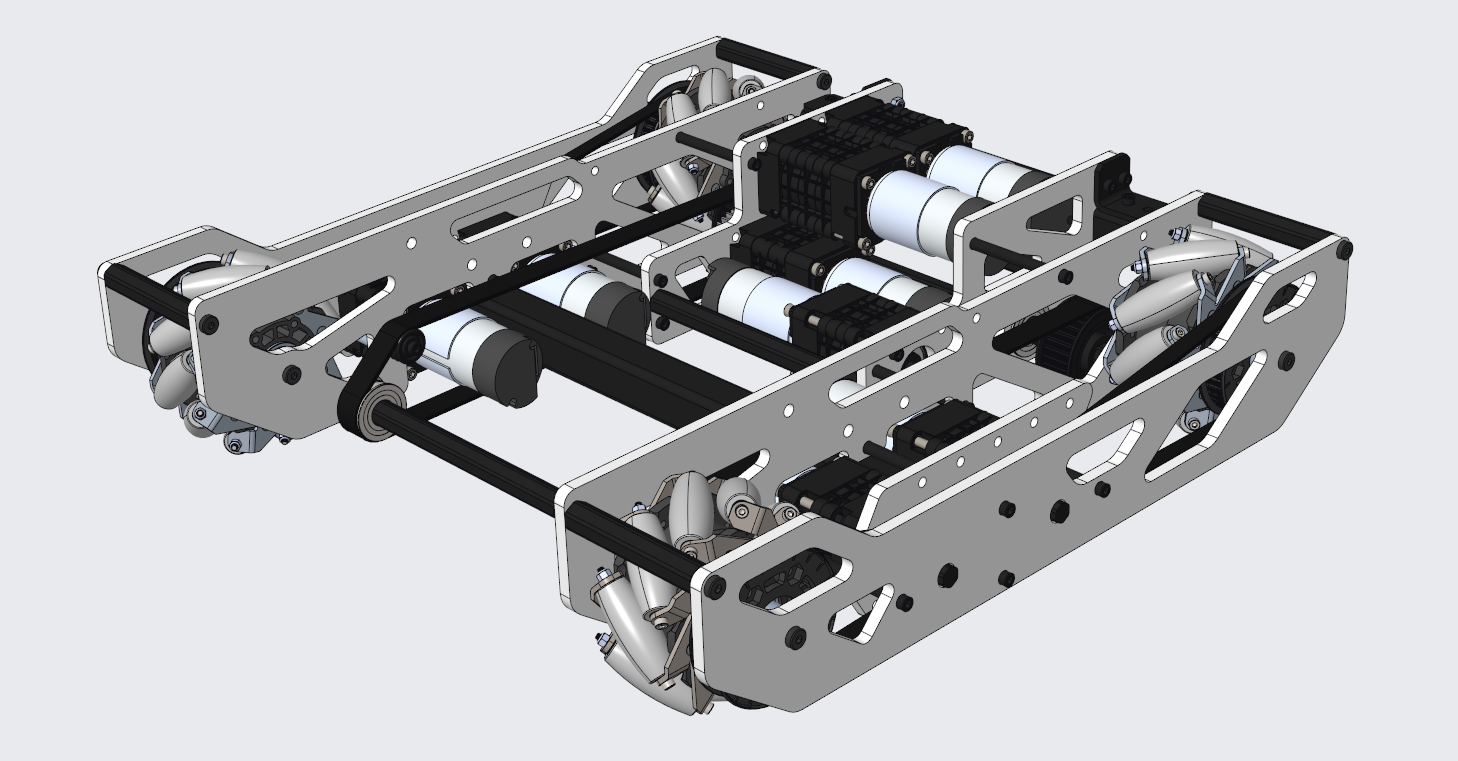
H-Drive#
La tracción en H (también conocida como tracción en U, según la configuración) es una tracción de tipo holonómico que utiliza todas las ruedas omnidireccionales. La propulsión H se basa en un conjunto de «ruedas strafer» perpendiculares a las ruedas delanteras/traseras para lograr el ametrallamiento. La propulsión H es similar a la fusión de un chasis de tanque, pero conserva la maniobrabilidad y el ametrallamiento de las propulsiones holonómicas.
H-Drive es teóricamente muy fácil de codificar, pero la mayoría de los equipos emplean algún tipo de corrección giroscópica para derrapar en línea recta, aunque no es necesario con una distribución adecuada del peso.
H-Drive tiene varias configuraciones de motor posibles: se pueden colocar 1 ó 2 motores en cada cápsula de propulsión delantera y uno o dos motores en las ruedas de ametrallamiento. En la configuración con un motor en cada cápsula de propulsión delantera, la aceleración de la propulsión H es ligeramente inferior a la de la propulsión mecanum.
Para la mayor fiabilidad posible, muchos equipos FRC ® suspenderán sus ruedas strafe en un sistema de balancín para asegurar que todas las ruedas están en contacto con el suelo mientras el robot no está ametrallando.
La mayor ventaja de la tracción en H es, con diferencia, su capacidad para adaptarse a múltiples distribuciones de motores. Por ejemplo, si quieres dedicar sólo 3 motores a tus mecanismos y te sobra un motor, usar una configuración de 1 motor de ametrallamiento y 4 motores de accionamiento es absolutamente viable. O si dedicas 5 motores a tus mecanismos, H-drive con 2 motores de accionamiento y 1 motor de strafe es definitivamente óptimo.
Ventajas#
Combina las ventajas del tanque y el chasis holonómico
Puede utilizarse con 3 ó 5 motores
Buena tracción y velocidad máxima
Gran maniobrabilidad y agilidad
Desventajas#
Ametrallamiento ligeramente menos eficaz que mecanum
Suspensión compleja ocasionalmente necesaria, dependiendo del diseño
9804 Bomb Squad, Relic Recovery#