Roller Chain¶
When your shafts aren’t right next to each other, roller chain and sprockets will allow you to transmit power securely between your shafts.
Term
- Chain¶
Roller chain is made up of a series of links joined by pins. Each link can rotate around its pins, creating a dynamic loop that can conform to any shape. The pins in the chain engage the gaps between teeth on each sprocket.
Chain number refers to the type and size of chain that is compatible with the sprocket. #25 chain and 8mm chain are both commonly used in FTC®.
If you’ve ridden a bike, chances are that you’ve already seen roller chain - the chain on your FTC robot is similar, but it’s probably a different pitch (different size). Chains most commonly used in FTC are #25 (1/4 inch pitch) or 8mm pitch.
When using chain, often there is a master link. This is a special type of link that has a removable end capsule in order to shorten the chain. However, as it is removable, it is not a very reliable chain link and can loosen and fall off under prolonged usage. There have been teams who have had master chain links fail during competition, costing them a match in the elimination rounds.
A chain breaker eliminates the need for master links because it can break and join chain at any point.
Attention
It is highly recommended that teams purchase a chain breaker (we recommend the DarkSoul chain breaker for #25 chain, and the goBILDA Chain Breaker for 8mm pitch chain) instead of using master links, which are prone to failure.

The removable master link is shown on the right.¶
Center-to-Center calculations¶
The equation to calculate center-to-center for chain is quite complicated. Many online calculators can calculate C-C distances without going through the tedious calculations. However, the complete formula is below.
\(C\) = center-to-center distance, inches
\(L\) = chain length in pitches
\(P\) = pitch of chain
\(N\) = number of teeth in large sprocket
\(n\) = number of teeth in small sprocket
Chain Wrap¶
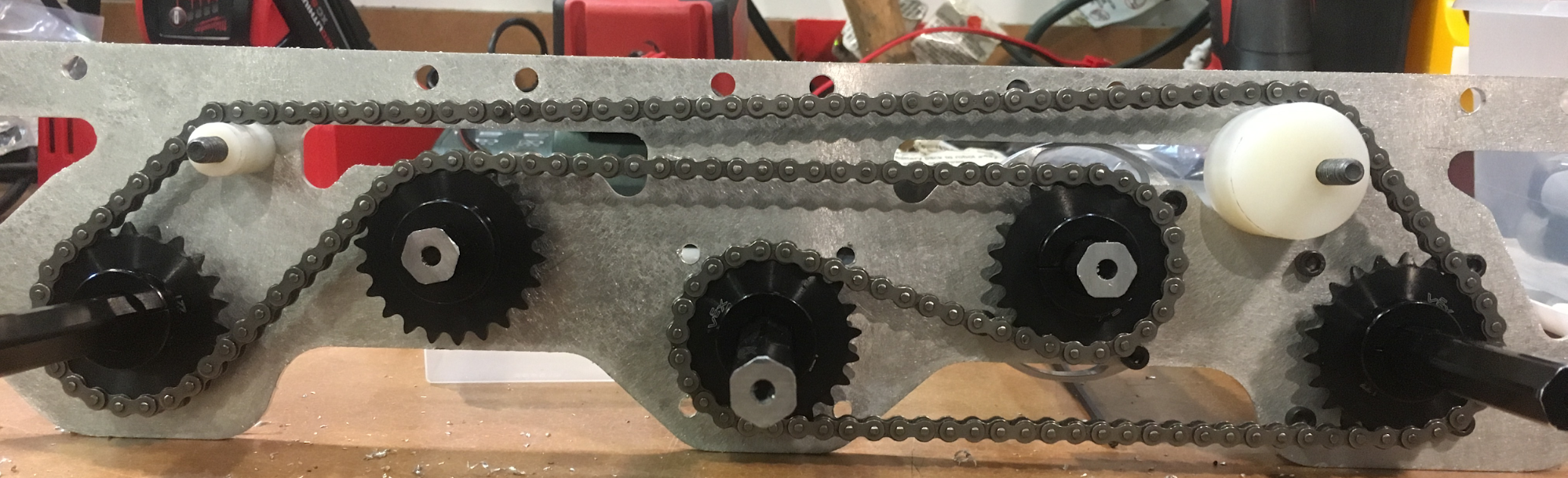
Chain should, at the very least, have 90 degrees of contact with the sprocket. The best practice is to have 180 degrees or more of contact, as it is very unlikely to fall off with proper tensioning. Chain skipping, especially on drivetrains or arms, is very possible without proper chain wrap or tensioning.
When tensioning chain, be sure to not undertension or overtension chain. Undertensioning chain can result in the chain falling off the sprocket or chain skipping, where the chain can skip along the sprocket. Overtensioning the chain often results in the motor burning out, or less seriously, a loss of efficiency. Push along the chain run, and if the chain moves slightly without significant resistance, chances are you’ve done it correctly. If it’s too tight, then the chain will barely move under a gentle press.
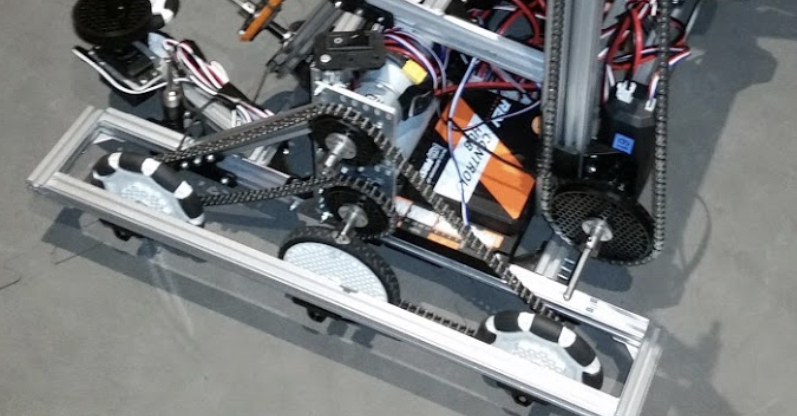
Best practices for wrap¶

724 Rednek Robotics Wun, Relic Recovery¶
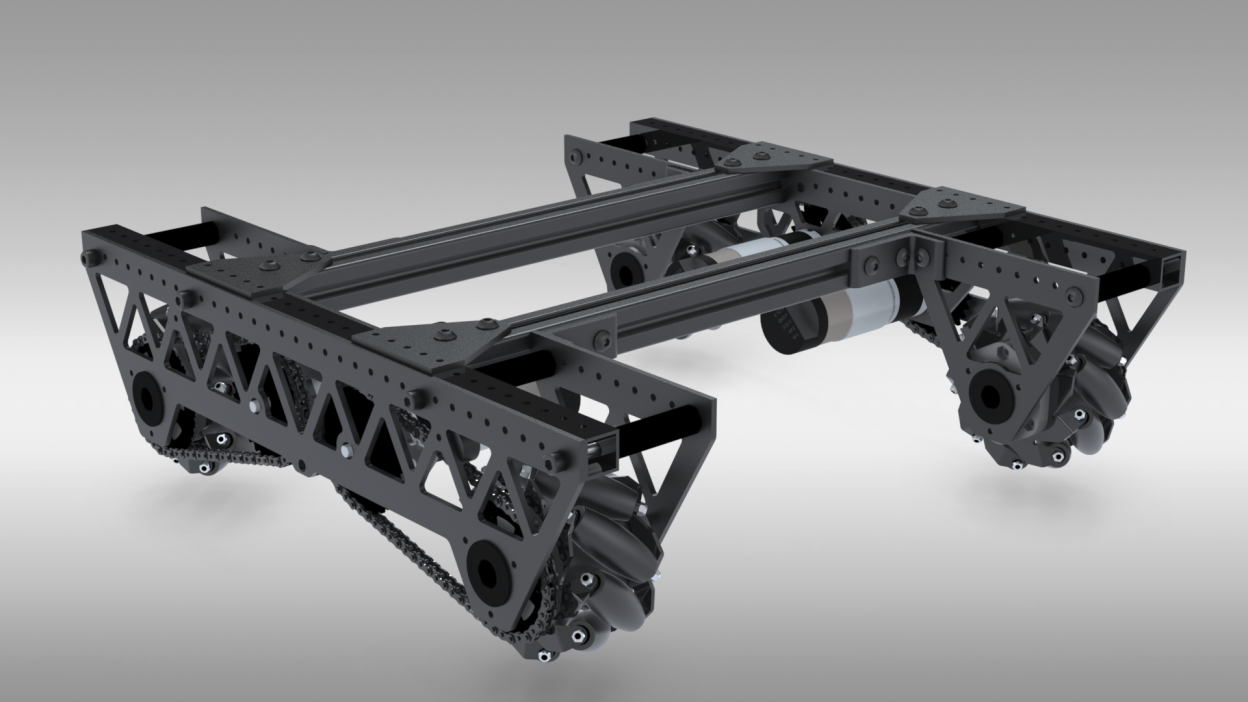
8103 Null Robotics, Rover Ruckus¶
Advantages¶
Chain can take a beating. No matter what your application is, metal chain is usually up for the challenge. #25 chain can hold up to 930lbs before breaking, and there’s nothing you’ll do in FTC that will exert that force. (If your chain does break, it’s most likely due to a faulty Master Link or sprockets that are not correctly aligned.)
Chain can be however long or short as you wish. If your ratio changes or your shafts move, it’s easy to adapt your chain run - just break the chain and put it back together at its new length. You can often do this without even removing the chain from your robot.
Chain can be pretty precise. When properly tensioned, roller chain doesn’t have very much slop. However, you really need to get your chain tension right to reduce slop, and you’ll probably want an adjustable tensioner for when the chain stretches. This can be done easily if using extrusion systems, as the sprocket can be adjusted for tension.
Disadvantages¶
Chain stretches over time. As it’s used, the connections between the links and rollers can stretch a bit. While it doesn’t look like much, this stretching can introduce lots of slop into your chain run and even derail it in some cases. You’ll most likely need an adjustable tensioner to keep your tension over time - some teams have used spring-loaded dynamic tensioners to automatically compensate for any changes.
The smaller the sprocket, the faster the chain stretch. This is because when the chain is run on a smaller sprocket, more force is applied due to a smaller radius.
Chain wrap, especially in one chain run, can be problematic. Typically, teams use either one or two chain runs (pieces of chain) per drivetrain side. However, one chain run can require more than one idler sprocket and get very complex in order to maintain proper chain wrap.
Sprockets are really big. If you want a really high reduction using chain, you’ll pay for it in the space that it takes up. Sprocket teeth are much larger than gear or pulley teeth, so your reductions are going to be much larger.
7244 OUT of the BOX Robotics, Relic Recovery¶
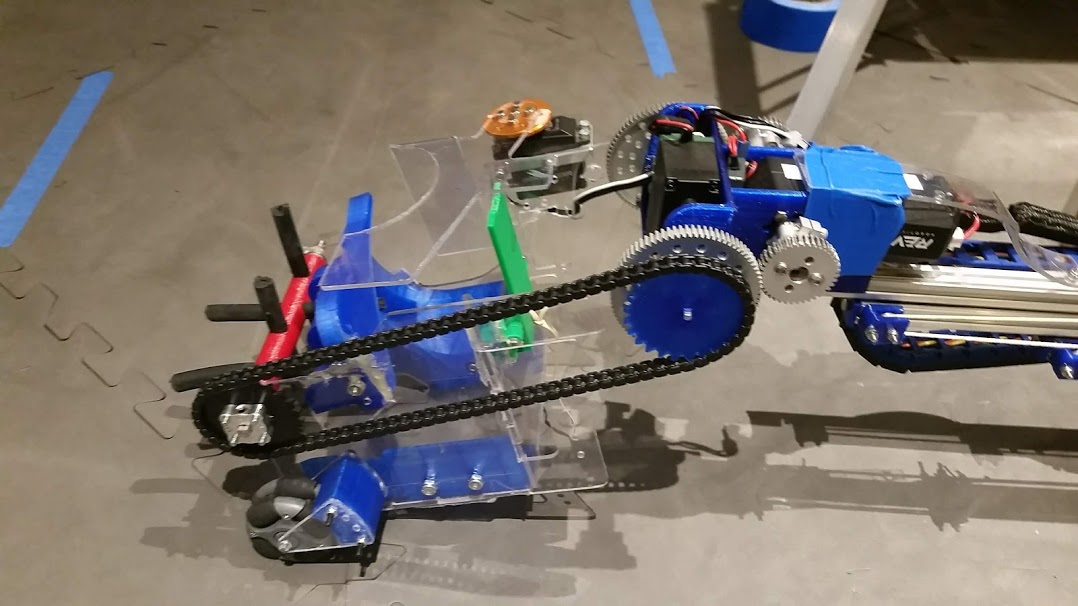
9794 Wizards.exe, Rover Ruckus, plastic chain on intake¶
Properly done chain wrap with the REV system¶