SDK Servos¶
The SDK offers several methods of controlling and communicating with servos, as well as a couple of hidden methods that can be easily accessed.
General Explanation¶
PWM Explanation¶
Servos are controlled via a PWM signal. PWM signal is one where the signal turns on for a number of microseconds, then off for a number of microseconds. Servos are controlled by sending variable length pulses every 20 ms, with the length of the pulses dictating what angle the servo should move to (or with CR servos, what speed it should move at). This length of the pulse, expressed in microseconds, is called the PWM pulse width. By default, the sdk generates signals from 600 to 2400 microseconds (with SDK 0 being 600 microseconds, and SDK 1 being 2400 microseconds). However, the expansion hub can actually generate between 500 and 2500 microseconds if the range is set manually.
5V Power¶
All servos require a minimum of 5V to operate, and so the expansion hub generates 5V to power the servos. The 5V power is shared between pairs of ports (0-1, 2-3, 4-5). By default, this 5V power is OFF, and doesn’t provide power. However, doing any servo operation, such as setting the position of a servo, will turn ON the 5V power to both shared ports. Calling disable PWM seems to turn OFF shared power, however if another servo is used or is active the 5V power will remain ON instead.
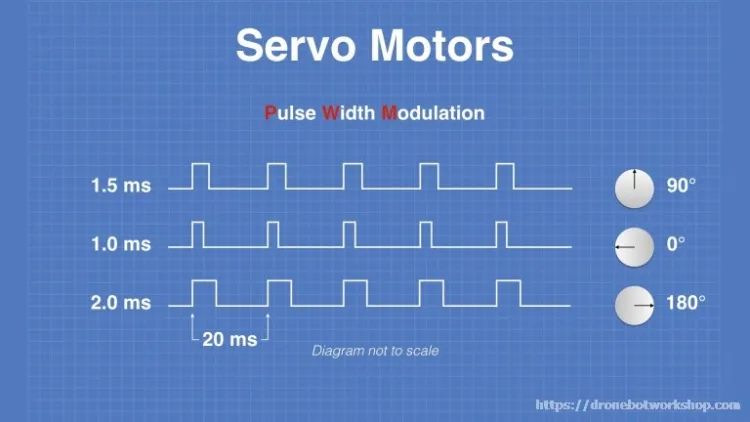
An example of servo PWM waves. NOTE: Servo angles are arbitrarily selected and will not be accurate to all servos¶
Warning
Every pair of two ports, (0-1, 2-3, 4-5) share the SAME 2 amp limitation, so care should be taken that pairs of servos do not pull more than 2 amps. Putting servos in every other port is recommended when possible.